1/72ハンニバル-9.5:追加ギミック暗礁 [コトブキヤ 1/72ハンニバル]
ちょっと間が空きました。
出来た!と思ったらダメだしを喰らってしょんぼりしていた…というのは半分冗談ですが、前回ちらりと書いた追加のギミックがどうにもこうにもで。
何をやろうとしてるのかは言わずもがなですが、うまくいってないので敢えて言わないでおきます。
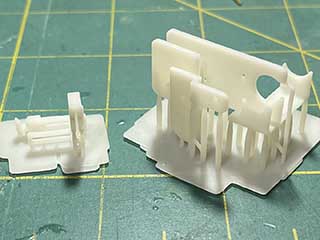
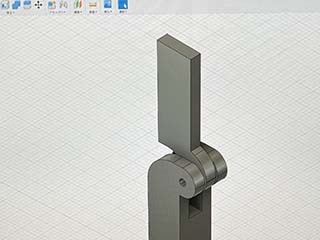
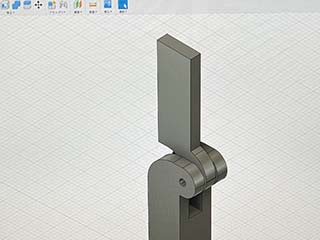
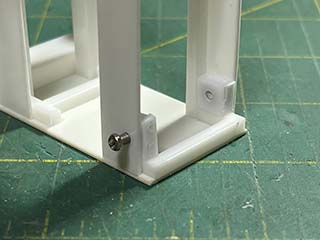
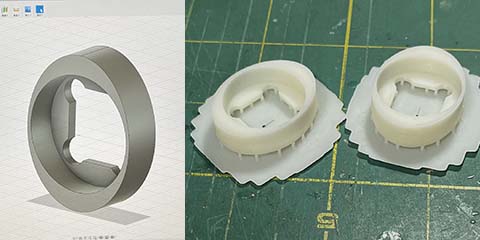
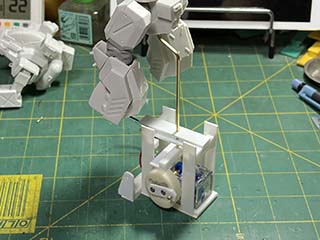
またまたFusion360でデジタルCAD設計。
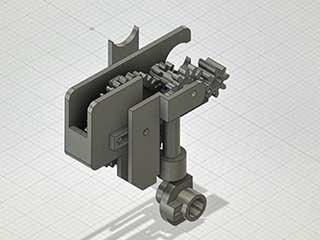
メインの疑似歩行ギミックよりガチじゃねーかって感じですが、まぁそうしないととても精度が担保できませんし、これでもウチの3Dプリント品質を考えるとギリギリ。
微調整を繰り返しつつ。

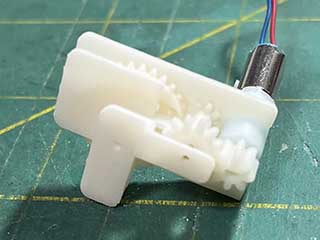
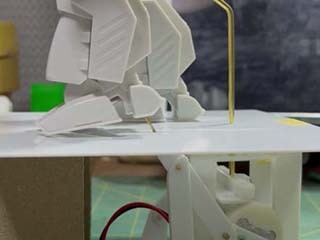
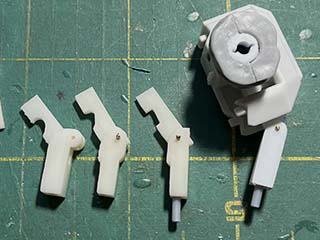
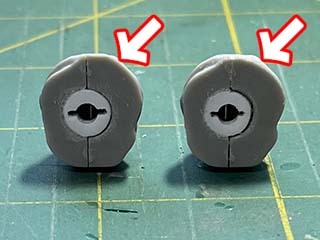
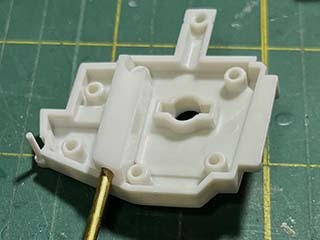
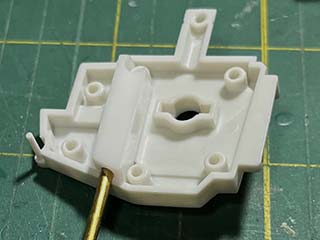
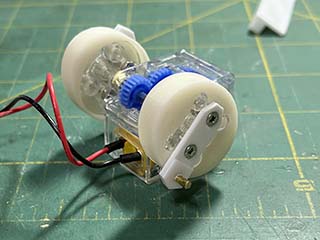
なんかに使えるだろうと買ってあった極小型のギヤードモーターに、初の自家製ギアを組み合わせてこんなかんじ。
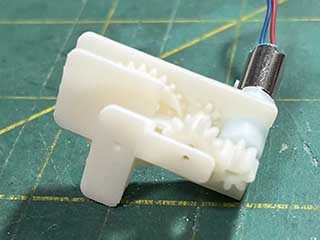
かなりきわどいながらも、自作ギアはどうにかうまいこといってるようです。ただ肝心のギミックのほうはといえば、もともとちょっと無理がある設計なのは分かってましたがやはり現実的ではなさそう…。
あとちょっとやってみてダメなら諦めようと最後の悪あがき。
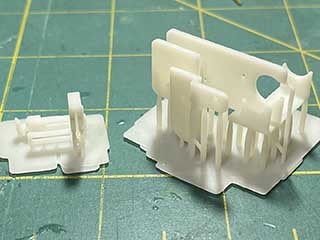
微妙な修正と再出力を繰り返して。
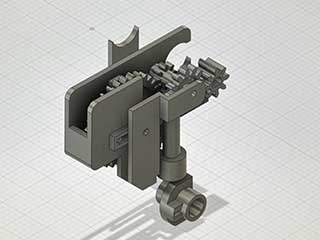
結果これです。
再生できない場合、ダウンロードは🎥こちら
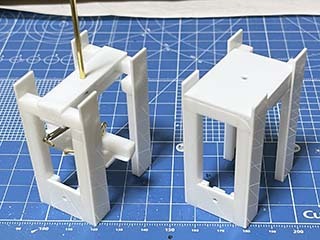
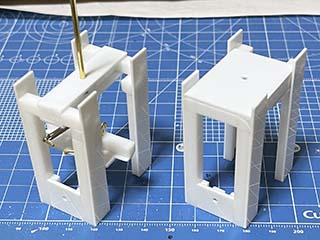
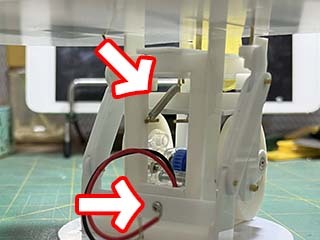
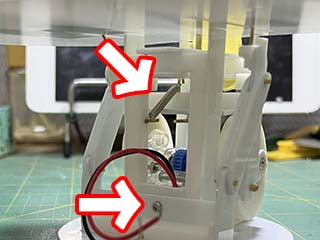
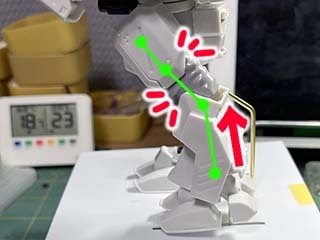
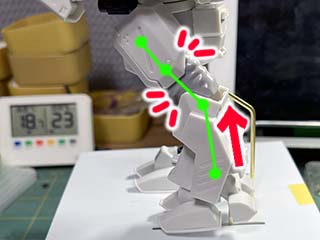
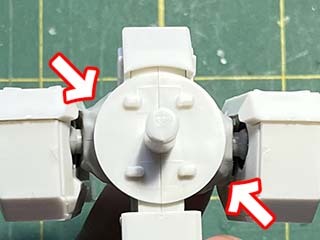
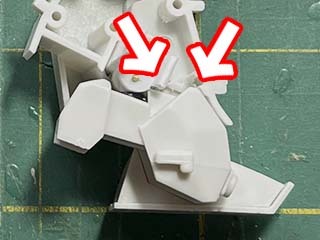
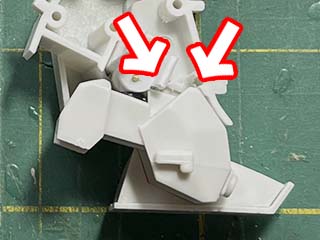
真ん中のちっちゃいアームがちょびっと前後にスライドしてるのがお分かりでしょうか。
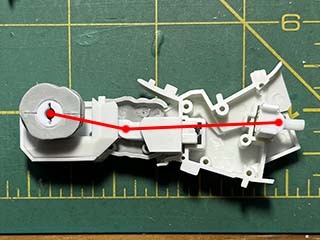
でかいギアの側面に掘った溝とアームに刺した真鍮線の凸部が噛み合って、溝の軌跡に沿って前後する、という構造なんですけども、いかんせんギア自体がこれ以上大きく出来ないので、小刻みに動かすには溝のライン取りがけっこうタイトになってしまう上に、動かしたい幅が2mmもないので遊びなのか設計上の動きなのかすら定かではない感じに…。
てことで、このやり方はやっぱボツにするしかありませんな。
この2週間あーでもないこーでもないと設計と試作に時間を費やしましたが、本来こういうのは極小サーボとかで電子制御にするべきです。その方がよっぽど早くてラクで正確なのは分かってましたが、モーター1個に電源供給するだけでループ可動するようなシンプルな構造に留めておきたくて、敢えて物理ギミックにこだわったのでした。結果、シンプルどころかめちゃくちゃ複雑になって破綻してるという。
あるいは、割り切ってもっと単純な動きにすればこんなに悩むこともないんですけど。単なる往復運動ではなく、1進んで0.5戻ってまた0.5進んで1戻る、とかって動きを機械的にやろうとすると難しい。
カラクリ系のサイトとか拝見していろんな機構を勉強しつつ、いまひとつコレってのがなくて。ひとつだけ可能性を感じてる機構はあるものの、あんまり上手くいく気がしないんだよな〜…。
とりあえず屍累々。

ちょっとテンション落ちてきてるので、またこっそり違うこと始めたりしていますが。
ではまた次回。
出来た!と思ったらダメだしを喰らってしょんぼりしていた…というのは半分冗談ですが、前回ちらりと書いた追加のギミックがどうにもこうにもで。
何をやろうとしてるのかは言わずもがなですが、うまくいってないので敢えて言わないでおきます。
またまたFusion360でデジタルCAD設計。
メインの疑似歩行ギミックよりガチじゃねーかって感じですが、まぁそうしないととても精度が担保できませんし、これでもウチの3Dプリント品質を考えるとギリギリ。
微調整を繰り返しつつ。

なんかに使えるだろうと買ってあった極小型のギヤードモーターに、初の自家製ギアを組み合わせてこんなかんじ。
かなりきわどいながらも、自作ギアはどうにかうまいこといってるようです。ただ肝心のギミックのほうはといえば、もともとちょっと無理がある設計なのは分かってましたがやはり現実的ではなさそう…。
あとちょっとやってみてダメなら諦めようと最後の悪あがき。
微妙な修正と再出力を繰り返して。
結果これです。
再生できない場合、ダウンロードは🎥こちら
真ん中のちっちゃいアームがちょびっと前後にスライドしてるのがお分かりでしょうか。
でかいギアの側面に掘った溝とアームに刺した真鍮線の凸部が噛み合って、溝の軌跡に沿って前後する、という構造なんですけども、いかんせんギア自体がこれ以上大きく出来ないので、小刻みに動かすには溝のライン取りがけっこうタイトになってしまう上に、動かしたい幅が2mmもないので遊びなのか設計上の動きなのかすら定かではない感じに…。
てことで、このやり方はやっぱボツにするしかありませんな。
この2週間あーでもないこーでもないと設計と試作に時間を費やしましたが、本来こういうのは極小サーボとかで電子制御にするべきです。その方がよっぽど早くてラクで正確なのは分かってましたが、モーター1個に電源供給するだけでループ可動するようなシンプルな構造に留めておきたくて、敢えて物理ギミックにこだわったのでした。結果、シンプルどころかめちゃくちゃ複雑になって破綻してるという。
あるいは、割り切ってもっと単純な動きにすればこんなに悩むこともないんですけど。単なる往復運動ではなく、1進んで0.5戻ってまた0.5進んで1戻る、とかって動きを機械的にやろうとすると難しい。
カラクリ系のサイトとか拝見していろんな機構を勉強しつつ、いまひとつコレってのがなくて。ひとつだけ可能性を感じてる機構はあるものの、あんまり上手くいく気がしないんだよな〜…。
とりあえず屍累々。

ちょっとテンション落ちてきてるので、またこっそり違うこと始めたりしていますが。
ではまた次回。
1/72ハンニバル-9:疑似歩行ギミック一段落 [コトブキヤ 1/72ハンニバル]
ベース周りがなんとなく形になってきましたので、細かい外装はおいといて、一旦もろもろをカッチリと組めるようにしていきます。
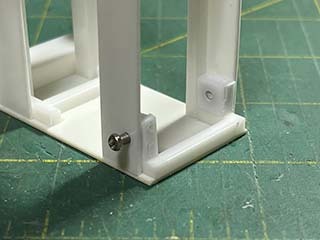
とはいえまずはステージ部の補強から。

シンプルに井桁を組んでくオーソドックスな形ですが、精度はまぁお察しです。
裏側だし、とりあえず最低限の強度が出れば良し。細かい調整は台座を作る頃になんとかしましょ。
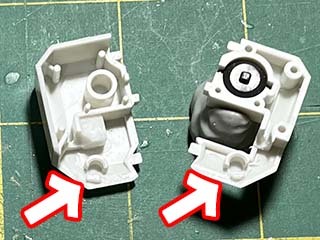
で、台座とステージの組み立てがカッチリしてきたところで、毎度の「固定したらマトモに動かないぞ」系のトラブルが発覚。ステージに切ったスリットに対して、右側だけアームが後退時に後端部と干渉してしまいます。
まぁ考えられるのは、ステージの井桁がちゃんとセンターとれてなくて明後日の方向にズレてるんでしょどうせ…と思ったんですが、問題はむしろ台座側のフレームにありました。
ご覧下さい。

なんということでしょう!
ズレてるとか精度がうんぬんというレベルを遥かに超えて捻れています。なんでや!!!
まぁ、そもそも精度が低い上に、接着部が固まらないうちにガシガシやって曲がったまま固着してるんでしょう。この上にステージ組んだらまぁ真っ直ぐになるわけがない。
これはもう作り直すしかありませんが、こういうのメンドクサイからやりたくないよね〜…でなかなかやる気がしないけれどやるしか。
てことで二つ目です。
直角とかすごい気を遣いました。いや、前も別にテキトーにやってたわけじゃないのよ…?
行き当たりばったりで一度形にしたモノが手元にあるわけなので、それを踏まえてより作りやすそうで精度が上がりそうなかんじで設計変更を加え、少しシンプルに、よりシャキッと。
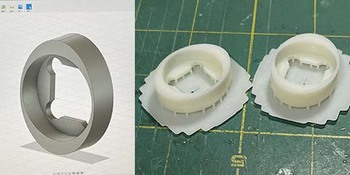
ついでに本体の上下ローリング用のカムも形状を微妙に変えていくつも試作。

一旦は画像の2種のさらに中間ぐらいで落ち着きましたがもうちょっと検証したいところ。
ここまで調整すればアームの問題も解決するやろ!…と思うじゃん?
組んで動かしたらまったく変わらないワケ。なんでや!!!!!!
結果、要のリンク機構に問題がありました…。
アームの支持軸が左右で1mmほどズレてたというね。
もう画像もありませんが、問題のあった右ではなく左側の軸位置が規定尺よりズレてることが発覚したので修正した結果、左側も右側と同じようにスリット後端に抵触するようになりました。
あとはスリットのサイズを左右とも同じだけ後ろに拡大してやれば解決です。
…ふぅ。
そして、これも面倒なので後回しにしていましたが、本体支持アームは本体側の接続部でもくるくる回転してしまうのでここも固定する必要があります。

パーツ構成上、後ろに外れる部分があるので組んだまま調整できるようにしようかと思いましたが、ちょっとダボ位置との関係で難しく、諦めてパーツ内部でビス止めできるような構造をちまちま作りました。しかし干渉を避けるとサイズが小さすぎて強度が足りないっぽい。
で、よく考えたら、どうせバラさないとダメな構造にするなら中で接着してしまえばいいのでは…とやっと気付いたのでガッツリ動かなくしてやりました。
また組み立て。
もうここまでくると、いつものことですが組んでバラしての工程も結構手間で、かつ手順を間違えると組めないのでなかなか苦労しますが。

どうにかこうにか、想定していた通りのことはひとまず出来た気がします。
まだ微調整の必要を感じる部分はありつつ、とりあえず現状の疑似歩行ギミックを動画でご覧下さい。
どや!
再生できない場合、ダウンロードは🎥こちら
マトモに歩くようになったので、並行して脳内プランだけは進んでた追加ギミックを考えていきます。
ではまた次回。
とはいえまずはステージ部の補強から。

シンプルに井桁を組んでくオーソドックスな形ですが、精度はまぁお察しです。
裏側だし、とりあえず最低限の強度が出れば良し。細かい調整は台座を作る頃になんとかしましょ。
で、台座とステージの組み立てがカッチリしてきたところで、毎度の「固定したらマトモに動かないぞ」系のトラブルが発覚。ステージに切ったスリットに対して、右側だけアームが後退時に後端部と干渉してしまいます。
まぁ考えられるのは、ステージの井桁がちゃんとセンターとれてなくて明後日の方向にズレてるんでしょどうせ…と思ったんですが、問題はむしろ台座側のフレームにありました。
ご覧下さい。

なんということでしょう!
ズレてるとか精度がうんぬんというレベルを遥かに超えて捻れています。なんでや!!!
まぁ、そもそも精度が低い上に、接着部が固まらないうちにガシガシやって曲がったまま固着してるんでしょう。この上にステージ組んだらまぁ真っ直ぐになるわけがない。
これはもう作り直すしかありませんが、こういうのメンドクサイからやりたくないよね〜…でなかなかやる気がしないけれどやるしか。
てことで二つ目です。
直角とかすごい気を遣いました。いや、前も別にテキトーにやってたわけじゃないのよ…?
行き当たりばったりで一度形にしたモノが手元にあるわけなので、それを踏まえてより作りやすそうで精度が上がりそうなかんじで設計変更を加え、少しシンプルに、よりシャキッと。
ついでに本体の上下ローリング用のカムも形状を微妙に変えていくつも試作。

一旦は画像の2種のさらに中間ぐらいで落ち着きましたがもうちょっと検証したいところ。
ここまで調整すればアームの問題も解決するやろ!…と思うじゃん?
組んで動かしたらまったく変わらないワケ。なんでや!!!!!!
結果、要のリンク機構に問題がありました…。
アームの支持軸が左右で1mmほどズレてたというね。
もう画像もありませんが、問題のあった右ではなく左側の軸位置が規定尺よりズレてることが発覚したので修正した結果、左側も右側と同じようにスリット後端に抵触するようになりました。
あとはスリットのサイズを左右とも同じだけ後ろに拡大してやれば解決です。
…ふぅ。
そして、これも面倒なので後回しにしていましたが、本体支持アームは本体側の接続部でもくるくる回転してしまうのでここも固定する必要があります。

パーツ構成上、後ろに外れる部分があるので組んだまま調整できるようにしようかと思いましたが、ちょっとダボ位置との関係で難しく、諦めてパーツ内部でビス止めできるような構造をちまちま作りました。しかし干渉を避けるとサイズが小さすぎて強度が足りないっぽい。
で、よく考えたら、どうせバラさないとダメな構造にするなら中で接着してしまえばいいのでは…とやっと気付いたのでガッツリ動かなくしてやりました。
また組み立て。
もうここまでくると、いつものことですが組んでバラしての工程も結構手間で、かつ手順を間違えると組めないのでなかなか苦労しますが。

どうにかこうにか、想定していた通りのことはひとまず出来た気がします。
まだ微調整の必要を感じる部分はありつつ、とりあえず現状の疑似歩行ギミックを動画でご覧下さい。
どや!
再生できない場合、ダウンロードは🎥こちら
マトモに歩くようになったので、並行して脳内プランだけは進んでた追加ギミックを考えていきます。
ではまた次回。
1/72ハンニバル-8:ベース周りあれこれ [コトブキヤ 1/72ハンニバル]
剛性が足りないことが判明したベースのフレームですが、展示ベースとしての見栄えも考慮しないとなので色々と悩みながら。
まずは、底板をt1.5mmのプラ板で裏打ち。位置関係さえ固定できればいいだろというt1.0mmではさすがに貧弱でしたね。

おしゃれな(!?)ラウンド形状にしてみました。
四角四面なベースってオーソドックスで良いんですけど、ガッチリ感が強すぎて、今回のような疑似歩行ギミックとはちょっと相性が悪い気がして。土台の存在をできるだけふわっとさせたいなと。
さらにフレーム部に補強材を足し、ビス止め箇所を追加。
自重で落ちてくるかと思いきや摩擦抵抗が強すぎた本体の上下ローリング部は、本体荷重によるテンションを若干相殺しつつ下方へ引き下げる形でスプリングをかましてみましたが、あんまり改善せず。できれば塗装までは避けたかったのですが致し方なくグリスをさしてみたらなんとか動くようになりましたのでどうにかこうにか。
んで、土台側の形が決まってきたら、肝心のステージ部となる地平面をどうするかです。

とりあえずギミック確認のために地平が必要だったので用意した仮形状のままでした。
結果、こう。

めちゃくちゃ悩んでいろいろ考えた挙げ句、円形の後端をちょっとだけスパッと落としたダイエーみたいな形に落ち着きました。
以下どうでもいい思考過程です。
底面と同じ理由で、円形にしようかなというのは割りと早い段階から考えてました。そのために仮ステージも正方形だったワケです。土台とステージの後端もほぼ揃うように計算していました。
ただ、これはこないだの支持アームの位置問題と同じで、本体を当然ステージのセンターに配置したつもりが、股間軸の位置で合わせてしまっていたというミス。ロボ系メカは背面より前面のほうがなにかと突出量が多いため、結果的にステージの前よりに立つ形になってしまっていました。
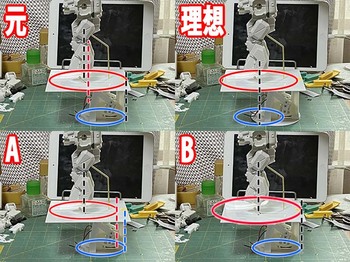
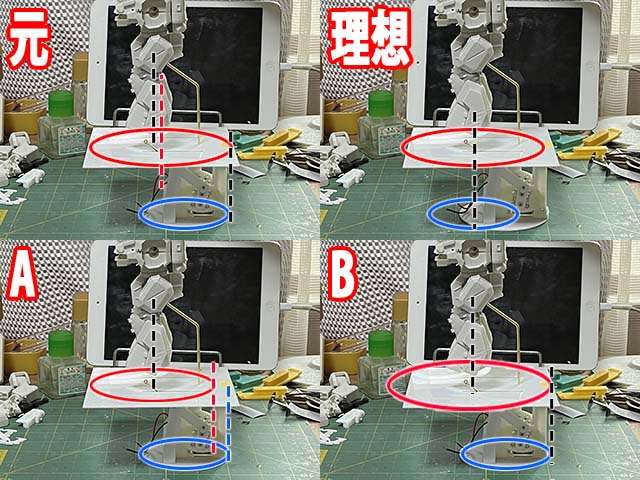
本来の理想としては、図の右上のようにステージも土台もセンターが揃ってるのがいちばん美しくはあります。ただ、チェビシェフリンク機構の構造上、ギミック部がどうしても後方にはみ出してしまうのでこれはあまり現実的ではありません。
ギアボックスを前後逆とか縦置きで配置していればもう少し後方を削れる気がしたのでまるっと作り直すことも検討したんですが、結局アーム部の可動範囲を考えるとほんの数ミリしか変わらないことが判明したので諦め。
ということで解決策としてあり得るのは大きく図A・Bの2パターン。
A=改めて本体がセンターに来るようステージを一回り小さくする、もしくはステージ位置を前にずらすパターン。これだと、土台が完全にステージより後方にはみ出すため、今回のようなモデルではアンバランス感が強く、不安定に見えます。
B=ステージのサイズを一回り大きくして本体位置をセンターにもってきつつ、ステージと台座の後端を揃えるパターン。これだと、さすがにステージ面が大きすぎて歩きギミックの不自然さが増すうえ、そもそも置き場所に困ります。
以上を踏まえてのAB折衷案が今回の選択。

「元」から、ステージのサイズも配置自体も変えず、ステージ後端を一部クロップしたのみ。
当然ステージと土台とのズレは発生しますが、人間の脳は欠けたモノを無意識のうちに補完して認識する特性があるため、クロップされてはいるもののステージ部後端が本来は土台と揃っていることが印象としては伝わり、Aパターンにあった露骨なズレ感は大幅に軽減できます。それでいて実際ステージ面に対して本体はセンターに配置されていますからその点もクリアです。
また、Bパターンのように無駄にステージ部を拡大する必要がないばかりか、完全な正円に比べ一部がクロップされていることでステージに方向感が生まれ、疑似歩行ギミックの効果が増す作用もあります。
さらに、背面側に直線を置いたことやクロップされた後端の幅が前端より広いことやで構図としても安定感が増し、全体的な重心の高さやステージと土台とのサイズ差からくるバランスの悪さも改善できるというわけです。
…知らんけど(笑)。
まぁ個人の感覚ですから、「いや変だよ」と思う人もいるでしょう。
でも色々考えて自分の中ではこれがベストだったんだもん。
ここからさらにどう作り込んでいくか。
本体を支持アームでがっつり保持してるとはいえ、思ってた以上に地平面には荷重がかかるんですよね。あんまりガッツリ感を出さずに、それでいて最低限の強度は確保しないといけないので、いろいろ検討中です。
ではまた次回。
まずは、底板をt1.5mmのプラ板で裏打ち。位置関係さえ固定できればいいだろというt1.0mmではさすがに貧弱でしたね。

おしゃれな(!?)ラウンド形状にしてみました。
四角四面なベースってオーソドックスで良いんですけど、ガッチリ感が強すぎて、今回のような疑似歩行ギミックとはちょっと相性が悪い気がして。土台の存在をできるだけふわっとさせたいなと。
さらにフレーム部に補強材を足し、ビス止め箇所を追加。
自重で落ちてくるかと思いきや摩擦抵抗が強すぎた本体の上下ローリング部は、本体荷重によるテンションを若干相殺しつつ下方へ引き下げる形でスプリングをかましてみましたが、あんまり改善せず。できれば塗装までは避けたかったのですが致し方なくグリスをさしてみたらなんとか動くようになりましたのでどうにかこうにか。
んで、土台側の形が決まってきたら、肝心のステージ部となる地平面をどうするかです。

とりあえずギミック確認のために地平が必要だったので用意した仮形状のままでした。
結果、こう。

めちゃくちゃ悩んでいろいろ考えた挙げ句、円形の後端をちょっとだけスパッと落としたダイエーみたいな形に落ち着きました。
以下どうでもいい思考過程です。
底面と同じ理由で、円形にしようかなというのは割りと早い段階から考えてました。そのために仮ステージも正方形だったワケです。土台とステージの後端もほぼ揃うように計算していました。
ただ、これはこないだの支持アームの位置問題と同じで、本体を当然ステージのセンターに配置したつもりが、股間軸の位置で合わせてしまっていたというミス。ロボ系メカは背面より前面のほうがなにかと突出量が多いため、結果的にステージの前よりに立つ形になってしまっていました。
本来の理想としては、図の右上のようにステージも土台もセンターが揃ってるのがいちばん美しくはあります。ただ、チェビシェフリンク機構の構造上、ギミック部がどうしても後方にはみ出してしまうのでこれはあまり現実的ではありません。
ギアボックスを前後逆とか縦置きで配置していればもう少し後方を削れる気がしたのでまるっと作り直すことも検討したんですが、結局アーム部の可動範囲を考えるとほんの数ミリしか変わらないことが判明したので諦め。
ということで解決策としてあり得るのは大きく図A・Bの2パターン。
A=改めて本体がセンターに来るようステージを一回り小さくする、もしくはステージ位置を前にずらすパターン。これだと、土台が完全にステージより後方にはみ出すため、今回のようなモデルではアンバランス感が強く、不安定に見えます。
B=ステージのサイズを一回り大きくして本体位置をセンターにもってきつつ、ステージと台座の後端を揃えるパターン。これだと、さすがにステージ面が大きすぎて歩きギミックの不自然さが増すうえ、そもそも置き場所に困ります。
以上を踏まえてのAB折衷案が今回の選択。

「元」から、ステージのサイズも配置自体も変えず、ステージ後端を一部クロップしたのみ。
当然ステージと土台とのズレは発生しますが、人間の脳は欠けたモノを無意識のうちに補完して認識する特性があるため、クロップされてはいるもののステージ部後端が本来は土台と揃っていることが印象としては伝わり、Aパターンにあった露骨なズレ感は大幅に軽減できます。それでいて実際ステージ面に対して本体はセンターに配置されていますからその点もクリアです。
また、Bパターンのように無駄にステージ部を拡大する必要がないばかりか、完全な正円に比べ一部がクロップされていることでステージに方向感が生まれ、疑似歩行ギミックの効果が増す作用もあります。
さらに、背面側に直線を置いたことやクロップされた後端の幅が前端より広いことやで構図としても安定感が増し、全体的な重心の高さやステージと土台とのサイズ差からくるバランスの悪さも改善できるというわけです。
…知らんけど(笑)。
まぁ個人の感覚ですから、「いや変だよ」と思う人もいるでしょう。
でも色々考えて自分の中ではこれがベストだったんだもん。
ここからさらにどう作り込んでいくか。
本体を支持アームでがっつり保持してるとはいえ、思ってた以上に地平面には荷重がかかるんですよね。あんまりガッツリ感を出さずに、それでいて最低限の強度は確保しないといけないので、いろいろ検討中です。
ではまた次回。
1/72ハンニバル-7.5:現状 [コトブキヤ 1/72ハンニバル]
う〜む。
ウィンウィン動かしながら観察していますと、またいろいろと気付きがあります。
ちょっと引っかかる部分、関節のどこかが悪さしてるんだろと思いましたが、どうやらベースのフレームの剛性が足りてないことにも原因があるようです。
よく見てると、リンク機構に特に負荷がかかる部分で土台のプラ板がちょっと歪む。それが戻る時にぐきっとなったりするみたい。
ベースまわりはここから手を加えるのであれば構造だけでなく最終的な完成図も踏まえて考えないといけないのですぐには進まないかな。
動作面では、本体支持アームの真鍮線に荷重でテンションがかかるせいでうまく動いてません。
ただ、持ち上がらないようだと困るんですけど以前書いた通りトルクは十分なので上昇は問題なく。むしろ摩擦で上がったまま落ちてこない。
引っ張り下ろすか、機体重量を打ち消す方向にテンションをかけるか。どうしよ。
とりあえずローリングの上下幅はもう少しあってもよさそうなので、カムを作り直します。
が、なんかPhotonがうまく動かない…。
データは問題ないのに、サポート部がなぜかほぼ消えます。パーツが埋まりかけてちょっと食われてるので使いものになりません。出力品そのものはちゃんとプリント出来てるので謎。
とりあえず基準点の再設定とかしてみてますが、思わぬ足踏みポイント。
てなわけで進捗がありませんので、出し惜しみしてた現状動画を上げておきます。
再生できない場合、ダウンロードは🎥こちら
左脚の爪先はもうちょっと上げたいなぁ…。
全体のギミック精度はそこまで高くないので、こういう微妙すぎる部分は左右を揃えるのが難しいです。
お得意の、あとちょっとが進まない感じになってきたのでやばいぞ。
ではまた次回。
ウィンウィン動かしながら観察していますと、またいろいろと気付きがあります。
ちょっと引っかかる部分、関節のどこかが悪さしてるんだろと思いましたが、どうやらベースのフレームの剛性が足りてないことにも原因があるようです。
よく見てると、リンク機構に特に負荷がかかる部分で土台のプラ板がちょっと歪む。それが戻る時にぐきっとなったりするみたい。
ベースまわりはここから手を加えるのであれば構造だけでなく最終的な完成図も踏まえて考えないといけないのですぐには進まないかな。
動作面では、本体支持アームの真鍮線に荷重でテンションがかかるせいでうまく動いてません。
ただ、持ち上がらないようだと困るんですけど以前書いた通りトルクは十分なので上昇は問題なく。むしろ摩擦で上がったまま落ちてこない。
引っ張り下ろすか、機体重量を打ち消す方向にテンションをかけるか。どうしよ。
とりあえずローリングの上下幅はもう少しあってもよさそうなので、カムを作り直します。
が、なんかPhotonがうまく動かない…。
データは問題ないのに、サポート部がなぜかほぼ消えます。パーツが埋まりかけてちょっと食われてるので使いものになりません。出力品そのものはちゃんとプリント出来てるので謎。
とりあえず基準点の再設定とかしてみてますが、思わぬ足踏みポイント。
てなわけで進捗がありませんので、出し惜しみしてた現状動画を上げておきます。
再生できない場合、ダウンロードは🎥こちら
左脚の爪先はもうちょっと上げたいなぁ…。
全体のギミック精度はそこまで高くないので、こういう微妙すぎる部分は左右を揃えるのが難しいです。
お得意の、あとちょっとが進まない感じになってきたのでやばいぞ。
ではまた次回。
1/72ハンニバル-7:各関節の再改修そして… [コトブキヤ 1/72ハンニバル]
前回検証を受けての各部関節の再改修を進めます。
ていうか改めて見ても前回の記事は2回に分けてもよかったな…。別に記事数を増やしてアクセス数稼ぎみたいなことには興味ありませんけど、ご覧頂くにしても長すぎる記事はアレですよね。まぁ毎度申し上げてる通り、無駄にだらだらと書き連ねるスタイルのブログなんですけど。
足首の関節も3D設計に切り替えました。
プラ材工作ver.がせっかくキットパーツにはめ込む形で結構うまいこと出来てたので、作り直すのはもったいない気もしますが、サイズ出しや干渉部の把握が終わってるので再設計もラクです。

前回はキット脛側のBJを軸関節に置き換える形で構成していましたが、クリアランス拡大のため、可動部を足側に移しています。引き続き組んでバラしてができるよう脛側にポリキャップを仕込めるようにしてあり、今までとは逆で足の軸を脛側に差し込む構造に。うまいくいきました。
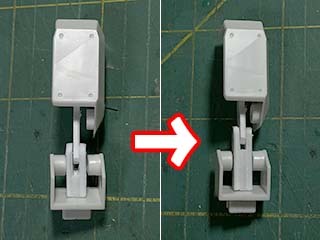
その改修の結果。

左がBEFORE、右がAFTER。
大して変わってないようにも見えますが、このちょっとの違いが大違い。
逆関節ストッパーを追加した膝の骨も交換して組み上げテスト。

「地下」部分もこまごまと微調整しまして、ようやくそれなりに歩けるようになりました!
とはいえまだまだ調整が足りてませんので動画はもうちょっと整ってからにしますが、ちょっとブレつつも完全に手放しで動作するようになったので、一山越えた感があります。
しばしウィンウィン言わせながら眺めて楽しみます。若干懸念していた歩幅の感じも悪くないんでは?
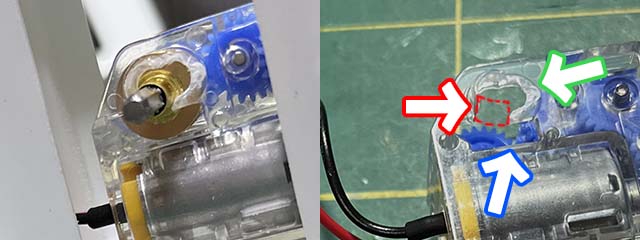
なんて思ってたら、どうもやけに左側がガタつきますね…またも新たな問題発覚か!?…と慌てて原因を探ったところ、なんとギアボックスのメイン動力シャフトを支える部分が破損していました。
前回「駆動ギミックのコア周りにいまのところ大きな問題が発生していないのが救い」とか書いた矢先にこれです。

左画像、シャフトが下にがくっと落ち込んでるのが分かるかと思います。
右画像、赤マーク部分が破断箇所。緑矢印の部分は干渉回避のため削ったとこなので、汚らしいですが仕様です。なぜかこのギアボックス、青矢印のとこに謎の四角い切り欠きがあるんですよね。今回動力シャフトにかなり重量がかかる構造なので、こんなとこが空洞になってたらそりゃ折れるわって話です。タミヤさんなんでこうなってんの…。
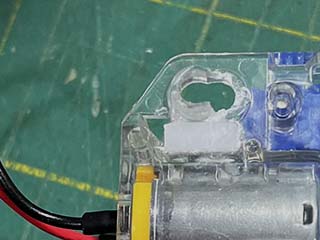
細かい破片が見つかりませんが大事な部分は残ってましたので接着しつつ、強度を低下させてた謎空洞にはプラ材をはめ込んで埋めておきました。

完成した後にこんな破損事故が起きたらだいぶテンション下がってたところですので、この段階で強度不足が発覚したのはむしろ良かったと思いましょう。
というわけで、疑似歩行ギミック、あとちょっとで完成です。
ではまた次回。
ていうか改めて見ても前回の記事は2回に分けてもよかったな…。別に記事数を増やしてアクセス数稼ぎみたいなことには興味ありませんけど、ご覧頂くにしても長すぎる記事はアレですよね。まぁ毎度申し上げてる通り、無駄にだらだらと書き連ねるスタイルのブログなんですけど。
足首の関節も3D設計に切り替えました。
プラ材工作ver.がせっかくキットパーツにはめ込む形で結構うまいこと出来てたので、作り直すのはもったいない気もしますが、サイズ出しや干渉部の把握が終わってるので再設計もラクです。

前回はキット脛側のBJを軸関節に置き換える形で構成していましたが、クリアランス拡大のため、可動部を足側に移しています。引き続き組んでバラしてができるよう脛側にポリキャップを仕込めるようにしてあり、今までとは逆で足の軸を脛側に差し込む構造に。うまいくいきました。
その改修の結果。

左がBEFORE、右がAFTER。
大して変わってないようにも見えますが、このちょっとの違いが大違い。
逆関節ストッパーを追加した膝の骨も交換して組み上げテスト。

「地下」部分もこまごまと微調整しまして、ようやくそれなりに歩けるようになりました!
とはいえまだまだ調整が足りてませんので動画はもうちょっと整ってからにしますが、ちょっとブレつつも完全に手放しで動作するようになったので、一山越えた感があります。
しばしウィンウィン言わせながら眺めて楽しみます。若干懸念していた歩幅の感じも悪くないんでは?
なんて思ってたら、どうもやけに左側がガタつきますね…またも新たな問題発覚か!?…と慌てて原因を探ったところ、なんとギアボックスのメイン動力シャフトを支える部分が破損していました。
前回「駆動ギミックのコア周りにいまのところ大きな問題が発生していないのが救い」とか書いた矢先にこれです。
左画像、シャフトが下にがくっと落ち込んでるのが分かるかと思います。
右画像、赤マーク部分が破断箇所。緑矢印の部分は干渉回避のため削ったとこなので、汚らしいですが仕様です。なぜかこのギアボックス、青矢印のとこに謎の四角い切り欠きがあるんですよね。今回動力シャフトにかなり重量がかかる構造なので、こんなとこが空洞になってたらそりゃ折れるわって話です。タミヤさんなんでこうなってんの…。
細かい破片が見つかりませんが大事な部分は残ってましたので接着しつつ、強度を低下させてた謎空洞にはプラ材をはめ込んで埋めておきました。
完成した後にこんな破損事故が起きたらだいぶテンション下がってたところですので、この段階で強度不足が発覚したのはむしろ良かったと思いましょう。
というわけで、疑似歩行ギミック、あとちょっとで完成です。
ではまた次回。
1/72ハンニバル-6:支持アーム修正と諸々の検証 [コトブキヤ 1/72ハンニバル]
3歩進んで5歩下がる。
次々と問題が発覚しております。
ただ、ちゃんと発覚してるだけ良くて、問題点が分かってさえいれば対処できます。どこが問題か分かんないのが一番マズイ。
引き続きアレコレやってる膝関節以前に、前々回で組んだ機体本体の支持アームに問題がありました。
真鍮線もφ2.0mmともなれば手加工も大変なのであまりやり直したくはないんですが、どうも機体の固定位置が後ろに寄りすぎてる。
リンク機構の動作レンジに対してセンターの直上に股関節の軸がくるようにしてて、実際そうなってはいるんですが…、おかし〜な〜計算間違えてないハズなんだけどな〜。としばし現物と採寸メモと睨めっこしてようやく間違いに気付きました。
リンク機構は踵に接続してますので、動作レンジのセンターは「踵の」動作中央位置。踵は股関節より後ろにありますから、踵が来るはずの位置に股関節を合わせたら当然その分機体がまるっと後ろにズレるはずです。馬鹿なの?
自分に呆れつつ作り直したら今度は加工時に測り間違えたのでもっかい作り直し…たらまた間違えて修正修正…。さらに採寸と加工のブレによる誤差を微調整すること数回。ようやく、本来の位置に固定することができた…ハズです。

で、前回からの宿題に戻りまして、膝関節リメイクの続きです。
軸位置をちょっとずつ変えて2パターンほど試してみましたが、ずらしていくほどに可動範囲は狭くなっていくので、やっぱり元の位置がベストな模様。テキトーにやってるようで、それなりにちゃんと考えて設計してあったみたいですね。
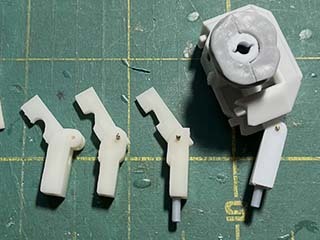
要は逆関節方向にスタックすることがなくなれば良いので、であれば関節が逆に曲がらないようロックを設けてやればいいのでは…?という単純なことにようやく気付きましたので、元の軸位置を維持したままリメイクしました。真ん中のが最新版です。
(ア、上の画像、右のパーツだけ左右逆です…)
上部にクリアランス確保のための切り欠きがありますけど、改めて確認したらこれが全く意味をなしてないことが判明し、太股パーツの内部をゴリゴリ削ってやったりもしつつ。
本体の固定位置も正しくなったので、作り直した膝も組み直して改めて動作テスト。今度こそうまくいく…かと思いきや、問題がより明確になっていく一方です。主に…
・膝の曲げ方向への可動範囲がまだ足りない。
・足首の前方への可動範囲がまだ足りない。
というのが現状。
いやそれ事実上大事なとこ全部じゃないか、と思いますが、ギアボックスを中心とした駆動ギミックのコア周りにいまのところ大きな問題が発生していないのが救いですね。
関節の可動範囲が足りないのは、元デザインやキット造形による制約もありますが、「歩幅」をかなりギリギリまで欲張ってるせいもありそう。やっぱり動かす以上はダイナミックに動いて欲しいですし、足先だけちょこちょこ動いてるのカッコ悪いしね、ということで、ちょっとオーバーなぐらいにレンジを広めにとってますので、いざ完成したらちょっとやり過ぎ感が出ちゃうかも知れません。
チェビシェフリンクは各アームの比率が決まってるため、万が一歩幅を変えることになった際は、駆動部がまるっと作り直しになります。やり過ぎ感も味としてうまく収まってくれるといいのですが。
しかし膝関節はともかく、足首の可動範囲の足りてなさは想定以上です。後ろに足を引く時、股関節よりちょっと後ろに行っただけでもうスタックしますので、かなりの可動範囲拡大が必要です。

ここが引っかかって膝位置が下がらないまま太ももが後ろに引っ張られるため、例の膝の逆関節問題が発生してしまう模様。改修策はいくつか思いつくので、どれが最適かは元パーツの形状も踏まえて検討しましょう。
などなど、あれこれやってる間に、ふと思ってしまったんです。
そもそもなんで、せっかくキットで二重関節になってる膝を一軸にダウングレードしてるんだ…? もとの二重関節のままぷらんぷらんにしてやれば、膝の可動範囲問題は解決では…?
とんだコペルニクス的転回!?
いやマジ解説しますと、なぜかといえばさっきも書いたばかりの逆関節状態の発生が理由です。二重関節がそれぞれS字状態で逆方向に曲がったら当然スタックしますから、それを避けるためにはシンプルな一軸可動が安全、という判断だったんですよね。
しかし今回やってみたように、そもそも逆に曲がらないようにしてやれば、そのリスクは考慮する必要がなくなりますから、だったら可動域の確保のためには元通り二重関節構造のほうが望ましい気がしてきます。
数日分の作業がまるっと無駄になるんですが…、まぁやってみて気付くことも少なくはない、ということで。
気を取り直してまたも3D設計。

膝関節の「骨」を作りました。
ただしコレが嵌まるべき元のダボは、膝下は生きてますが膝上のを半ば削り飛ばしてしまってます…。
元通りパイプ状に再生しようとすると結構な手間ですが、半分残ってるので軸が下に落ちさえしなければと、プラ材で「ストッパー」を設けてダボを復活させました。強度に若干の不安が残りはしますがひとまずこれで。
んで、組んで動作させてみて、こう。

上述の足首可動が足りてない問題、キットのパーツ構成としては膝下の関節が敢えて逆関節状態になることでクリアする設計になってるようですね。道理でやけに関節部の膝下がスカスカだと思いました。と、元の可動範囲をちゃんと検証せずに加工を始めてしまったので、今更把握。
この状態でもマトモに動く時は動くんですが、逆関節状態が前提ということはやっぱり時々こうなってしまいます。
あちらを立てればこちらが立たず。が、冒頭の言葉通り、明らかになった問題は順に潰していけばいいだけ、のハズ。
以上の検証を踏まえて整理しますと…
・膝はキット通り二重関節に戻すことで可動範囲を確保できそう。
・ただし膝が逆関節にならないよう可動範囲を制限する必要あり。
・結果、膝でカバーできないので足首関節の可動範囲拡大は必要。
ということに。
複数の関節が同時に可動するギミックは、やっぱり問題の切り分けと検証もスムーズにはいきませんね、とか思いますが半分ぐらいは自分の考え足らずなのでお恥ずかしい限りです。
そして実は、後ろに引いた足を蹴り上げる際に爪先が地平面に引っかかる、っていう症状も確認しているんですが、これは膝と足首の可動範囲拡大で解消できるような気がしています。

でも爪先が別途可動するとそれはそれでより自然なモーションになる気がしますんで、迷うところです。とか言って、膝と足首の改修で解消されなければ改造せざるを得ませんし、その場合さらに可動部が増えることでどう動くのか全く分かりませんけど。どうなりますやら。
作業自体は大して進んでないくせに無駄になげーな今回…。
ではまた次回。
次々と問題が発覚しております。
ただ、ちゃんと発覚してるだけ良くて、問題点が分かってさえいれば対処できます。どこが問題か分かんないのが一番マズイ。
引き続きアレコレやってる膝関節以前に、前々回で組んだ機体本体の支持アームに問題がありました。
真鍮線もφ2.0mmともなれば手加工も大変なのであまりやり直したくはないんですが、どうも機体の固定位置が後ろに寄りすぎてる。
リンク機構の動作レンジに対してセンターの直上に股関節の軸がくるようにしてて、実際そうなってはいるんですが…、おかし〜な〜計算間違えてないハズなんだけどな〜。としばし現物と採寸メモと睨めっこしてようやく間違いに気付きました。
リンク機構は踵に接続してますので、動作レンジのセンターは「踵の」動作中央位置。踵は股関節より後ろにありますから、踵が来るはずの位置に股関節を合わせたら当然その分機体がまるっと後ろにズレるはずです。馬鹿なの?
自分に呆れつつ作り直したら今度は加工時に測り間違えたのでもっかい作り直し…たらまた間違えて修正修正…。さらに採寸と加工のブレによる誤差を微調整すること数回。ようやく、本来の位置に固定することができた…ハズです。

で、前回からの宿題に戻りまして、膝関節リメイクの続きです。
軸位置をちょっとずつ変えて2パターンほど試してみましたが、ずらしていくほどに可動範囲は狭くなっていくので、やっぱり元の位置がベストな模様。テキトーにやってるようで、それなりにちゃんと考えて設計してあったみたいですね。
要は逆関節方向にスタックすることがなくなれば良いので、であれば関節が逆に曲がらないようロックを設けてやればいいのでは…?という単純なことにようやく気付きましたので、元の軸位置を維持したままリメイクしました。真ん中のが最新版です。
(ア、上の画像、右のパーツだけ左右逆です…)
上部にクリアランス確保のための切り欠きがありますけど、改めて確認したらこれが全く意味をなしてないことが判明し、太股パーツの内部をゴリゴリ削ってやったりもしつつ。
本体の固定位置も正しくなったので、作り直した膝も組み直して改めて動作テスト。今度こそうまくいく…かと思いきや、問題がより明確になっていく一方です。主に…
・膝の曲げ方向への可動範囲がまだ足りない。
・足首の前方への可動範囲がまだ足りない。
というのが現状。
いやそれ事実上大事なとこ全部じゃないか、と思いますが、ギアボックスを中心とした駆動ギミックのコア周りにいまのところ大きな問題が発生していないのが救いですね。
関節の可動範囲が足りないのは、元デザインやキット造形による制約もありますが、「歩幅」をかなりギリギリまで欲張ってるせいもありそう。やっぱり動かす以上はダイナミックに動いて欲しいですし、足先だけちょこちょこ動いてるのカッコ悪いしね、ということで、ちょっとオーバーなぐらいにレンジを広めにとってますので、いざ完成したらちょっとやり過ぎ感が出ちゃうかも知れません。
チェビシェフリンクは各アームの比率が決まってるため、万が一歩幅を変えることになった際は、駆動部がまるっと作り直しになります。やり過ぎ感も味としてうまく収まってくれるといいのですが。
しかし膝関節はともかく、足首の可動範囲の足りてなさは想定以上です。後ろに足を引く時、股関節よりちょっと後ろに行っただけでもうスタックしますので、かなりの可動範囲拡大が必要です。

ここが引っかかって膝位置が下がらないまま太ももが後ろに引っ張られるため、例の膝の逆関節問題が発生してしまう模様。改修策はいくつか思いつくので、どれが最適かは元パーツの形状も踏まえて検討しましょう。
などなど、あれこれやってる間に、ふと思ってしまったんです。
そもそもなんで、せっかくキットで二重関節になってる膝を一軸にダウングレードしてるんだ…? もとの二重関節のままぷらんぷらんにしてやれば、膝の可動範囲問題は解決では…?
とんだコペルニクス的転回!?
いやマジ解説しますと、なぜかといえばさっきも書いたばかりの逆関節状態の発生が理由です。二重関節がそれぞれS字状態で逆方向に曲がったら当然スタックしますから、それを避けるためにはシンプルな一軸可動が安全、という判断だったんですよね。
しかし今回やってみたように、そもそも逆に曲がらないようにしてやれば、そのリスクは考慮する必要がなくなりますから、だったら可動域の確保のためには元通り二重関節構造のほうが望ましい気がしてきます。
数日分の作業がまるっと無駄になるんですが…、まぁやってみて気付くことも少なくはない、ということで。
気を取り直してまたも3D設計。

膝関節の「骨」を作りました。
ただしコレが嵌まるべき元のダボは、膝下は生きてますが膝上のを半ば削り飛ばしてしまってます…。
元通りパイプ状に再生しようとすると結構な手間ですが、半分残ってるので軸が下に落ちさえしなければと、プラ材で「ストッパー」を設けてダボを復活させました。強度に若干の不安が残りはしますがひとまずこれで。
んで、組んで動作させてみて、こう。

上述の足首可動が足りてない問題、キットのパーツ構成としては膝下の関節が敢えて逆関節状態になることでクリアする設計になってるようですね。道理でやけに関節部の膝下がスカスカだと思いました。と、元の可動範囲をちゃんと検証せずに加工を始めてしまったので、今更把握。
この状態でもマトモに動く時は動くんですが、逆関節状態が前提ということはやっぱり時々こうなってしまいます。
あちらを立てればこちらが立たず。が、冒頭の言葉通り、明らかになった問題は順に潰していけばいいだけ、のハズ。
以上の検証を踏まえて整理しますと…
・膝はキット通り二重関節に戻すことで可動範囲を確保できそう。
・ただし膝が逆関節にならないよう可動範囲を制限する必要あり。
・結果、膝でカバーできないので足首関節の可動範囲拡大は必要。
ということに。
複数の関節が同時に可動するギミックは、やっぱり問題の切り分けと検証もスムーズにはいきませんね、とか思いますが半分ぐらいは自分の考え足らずなのでお恥ずかしい限りです。
そして実は、後ろに引いた足を蹴り上げる際に爪先が地平面に引っかかる、っていう症状も確認しているんですが、これは膝と足首の可動範囲拡大で解消できるような気がしています。

でも爪先が別途可動するとそれはそれでより自然なモーションになる気がしますんで、迷うところです。とか言って、膝と足首の改修で解消されなければ改造せざるを得ませんし、その場合さらに可動部が増えることでどう動くのか全く分かりませんけど。どうなりますやら。
作業自体は大して進んでないくせに無駄になげーな今回…。
ではまた次回。
1/72ハンニバル-5:股関節の改修と膝関節の問題点 [コトブキヤ 1/72ハンニバル]
ガッ…!ギギギギギ……バシャァッ!!
を繰り返しながら、マトモに動作しない歩行ギミックを検証。
結果、今更ながら意外な事実が判明しました。
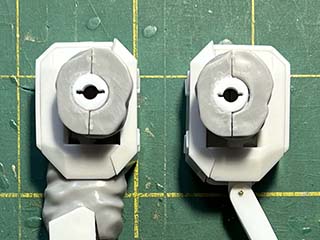
こちら、左脚の股関節ですが、関節パーツの上部が腰に干渉しています。

可動化改造に際して軸の位置は基本的に変えてませんので、確証はないですがおそらくキットの時点でこうなってる。
もともと股関節は外側にもうひとつポリキャップのBJ可動部があって二重関節状態なので、ここがスタックしても外側でカバーできるため目立たず、パチ組み段階ではそこまで気付いていなかった模様。かつ、改造で股間軸に若干の遊びが出てたので、ちょっと引っかかってもどうにか誤魔化せてしまっていたようで、本体を固定するまで発覚していませんでした。
で、このパーツ、左右共通なんですよ。左右「対称」じゃなくて。インストに「×2」って書いてあるヤツ。
つまりこうなってます。

左脚の前側が干渉してるってことは、右脚は後ろ側に凸ってることに。
ほら。

どうりで、左右でひっかかり方が違うわけです。
上から見るとよく分かります。
左は前が、右は後ろが出っ張っていて左右対称になってない。かつそれぞれ干渉してる、と。
なんでこんなことになってるのかといえば、まぁ本来まるっと埋まってるはずの関節部の見栄えと可動を両立させるためのバランスでしょうね。模型に限らずいろんなモノってだいたい「左前」「右後」から撮影することが多く、本キットもインストの完成図は例に漏れず「左前」「右後」からの写真。
ここがちょびっと出っ張ってるだけでそれなりに見た目に影響している気がします。
勝手な想像ですので、実際にそういう意図なのかは分かりませんけれども。
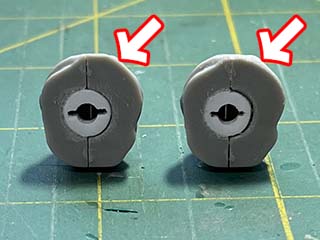
幸い肉厚な部分だったので、サクッと削りました。
左がBEFORE、右がAFTERです。
そこまで変わってませんがこれで股関節の干渉部分はクリア。
もう大丈夫やろ!と再度組み上げて電源ON。
ガッ…!ギギギギギ……バシャァッ!!
…。
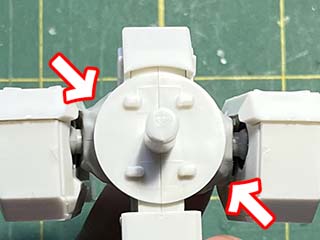
実はとっくに分かってたんですが(負け惜しみ)、自作した膝関節の位置に問題があります。こちらをご覧下さい。
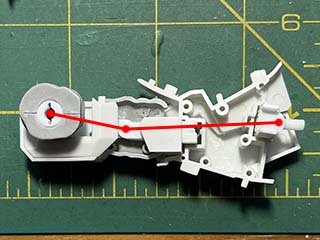
膝の関節が真っ直ぐに伸びた状態で、股間軸・膝・足首の各可動軸を結んだ図です。
画像上が前方なので、若干の「逆関節」になってしまってるのが一目瞭然。この状態にならないことのほうが多いはずではあるんですが、各関節を個別に駆動してるワケではないので何かの拍子にこうなってしまうことがしばしばあります。
今回の疑似歩行ギミックは、踵に接続した駆動軸で脚部を操作してますので、この状態で踵から股間軸に向かって力が働くと、膝が逆に押されてスタックするという当然の結果になるわけで。
これを解消するにはまぁご覧のとおり膝の関節位置をもう3〜4mm前にズラしてやる必要があるわけですが、たかが3mmされど3mm。そもそも関節が前寄りにあるとその分曲げた時に突き出すので、膝関節のカバーパーツと干渉するため、敢えてこの位置にしてたもの。これを前にずらしてギリのラインを探るのはなかなか難儀しそうですし、軸位置が変わるとそもそもこの辺の可動域ががらっと変わります。
それによって何がどうなるのかは、綿密なシミュレーションを行うか、とりあえずやってみるか、しかありません。
のでやってみるんですけど。
微調整の繰り返しになる可能性が高いので、いちいちプラ材で作るのはしんどいな〜…てことで、またまたFusion360でデジタル設計開始。
やっぱ最初から全部3Dでやればよかったんじゃ…とまた思うなど。
果たして各部もろもろのクリアランスを調整することはできるでしょうか。
ではまた次回。
を繰り返しながら、マトモに動作しない歩行ギミックを検証。
結果、今更ながら意外な事実が判明しました。
こちら、左脚の股関節ですが、関節パーツの上部が腰に干渉しています。

可動化改造に際して軸の位置は基本的に変えてませんので、確証はないですがおそらくキットの時点でこうなってる。
もともと股関節は外側にもうひとつポリキャップのBJ可動部があって二重関節状態なので、ここがスタックしても外側でカバーできるため目立たず、パチ組み段階ではそこまで気付いていなかった模様。かつ、改造で股間軸に若干の遊びが出てたので、ちょっと引っかかってもどうにか誤魔化せてしまっていたようで、本体を固定するまで発覚していませんでした。
で、このパーツ、左右共通なんですよ。左右「対称」じゃなくて。インストに「×2」って書いてあるヤツ。
つまりこうなってます。
左脚の前側が干渉してるってことは、右脚は後ろ側に凸ってることに。
ほら。

どうりで、左右でひっかかり方が違うわけです。
上から見るとよく分かります。
左は前が、右は後ろが出っ張っていて左右対称になってない。かつそれぞれ干渉してる、と。
なんでこんなことになってるのかといえば、まぁ本来まるっと埋まってるはずの関節部の見栄えと可動を両立させるためのバランスでしょうね。模型に限らずいろんなモノってだいたい「左前」「右後」から撮影することが多く、本キットもインストの完成図は例に漏れず「左前」「右後」からの写真。
ここがちょびっと出っ張ってるだけでそれなりに見た目に影響している気がします。
勝手な想像ですので、実際にそういう意図なのかは分かりませんけれども。
幸い肉厚な部分だったので、サクッと削りました。
左がBEFORE、右がAFTERです。
そこまで変わってませんがこれで股関節の干渉部分はクリア。
もう大丈夫やろ!と再度組み上げて電源ON。
ガッ…!ギギギギギ……バシャァッ!!
…。
実はとっくに分かってたんですが(負け惜しみ)、自作した膝関節の位置に問題があります。こちらをご覧下さい。
膝の関節が真っ直ぐに伸びた状態で、股間軸・膝・足首の各可動軸を結んだ図です。
画像上が前方なので、若干の「逆関節」になってしまってるのが一目瞭然。この状態にならないことのほうが多いはずではあるんですが、各関節を個別に駆動してるワケではないので何かの拍子にこうなってしまうことがしばしばあります。
今回の疑似歩行ギミックは、踵に接続した駆動軸で脚部を操作してますので、この状態で踵から股間軸に向かって力が働くと、膝が逆に押されてスタックするという当然の結果になるわけで。
これを解消するにはまぁご覧のとおり膝の関節位置をもう3〜4mm前にズラしてやる必要があるわけですが、たかが3mmされど3mm。そもそも関節が前寄りにあるとその分曲げた時に突き出すので、膝関節のカバーパーツと干渉するため、敢えてこの位置にしてたもの。これを前にずらしてギリのラインを探るのはなかなか難儀しそうですし、軸位置が変わるとそもそもこの辺の可動域ががらっと変わります。
それによって何がどうなるのかは、綿密なシミュレーションを行うか、とりあえずやってみるか、しかありません。
のでやってみるんですけど。
微調整の繰り返しになる可能性が高いので、いちいちプラ材で作るのはしんどいな〜…てことで、またまたFusion360でデジタル設計開始。
やっぱ最初から全部3Dでやればよかったんじゃ…とまた思うなど。
果たして各部もろもろのクリアランスを調整することはできるでしょうか。
ではまた次回。
1/72ハンニバル-4:本体支持部とローリングギミック [コトブキヤ 1/72ハンニバル]
前回までで「歩き」はなんとかなってきたので、もろもろちゃんと組み上げられるようにしていきます。
まずは前回ちらっと書いた機体の支持方法から。
うだうだ悩んでたのは、当初プランでは腰の回転をフリーにして、歩行に合わせて少し腰を捻るようにしたら自然な動きになるんじゃないかと考えてたからです。それを実現するには腰より上で上半身を固定し、下半身が回転できるよう軸を設ける必要がありました。
が、ここまでの動作テストを振り返ると、可動部が増えて動作の確実性が損なわれるのであまり現実的じゃないなというのと、むしろ真っ直ぐ歩かせる方がメカっぽさが出ていいんじゃないかなと。
そうなれば、上半身と下半身、つまり腰と股関節とを別個に動かす必要がなくなります。シンプルに股関節ブロックの後方下面から真鍮線をぶっ刺す形に落ち着きました。つまんない結末ですが。
さっそく股関節ブロックをまたバラします。

左右分割の股関節を前後のパーツがしっかり固定してくれる構造なのでありがたい。
寸法を測ると、内部の空洞幅がちょうど5mmだったので、ここに5mmのプラ角棒を配します。
プラ棒に穿孔し、外装にも穴を穿けて真鍮線を突き刺せるように加工。それなりの重量がかかるので真鍮線はφ2mmです。
一方、それをさらに支えるベースブロックの構造体も作っていかなければなりません。
ということで、ヒヒ〜ン。お馬さんのようなこれ。

四つ脚のフレームをプラ材をあれこれして組み上げました。
こういうの、位置関係のクリアランスとか強度とか精度とか、いろいろと考慮しなきゃいけないことが多くてとても面倒くさく手間がかかるわりに、仕上がりが地味なのでなかなか進みません。
さらに、零式ヘッドの時に痛感しましたが、電動ギミックの構造部はとにかくいかにガッチリと固定できるか、いかに「バラして組んで」がやりやすいか、がキモ。ビス止め構造を仕込んでいきます。

この六角ナットをプラ材で固定する作業も地味でなかなかやる気でないですが。
ご覧の通り「パンの袋を止めるやつ」を有効活用。よく言われるとおり、プラモ用接着剤が効くので、こういうちょっとした部分にちょうど良いんですよね。一生分ぐらい溜め込んでるので使い切れる気がしませんけど。
んで、こう。
さらにネジ穴を貫通させてギアボックスまで一体で固定できるようにしました。
そして、3D設計&プリントしてこんなものを造形。
こういう形って、いかにも「3Dプリンタ使いました感」あっていいですよね(笑)。
せっかくできる環境あるんだから、だったらギミック全部まるごと3D設計したらいいんじゃね?って気になりますが。じつは最初それもやりかけたんですけど、、精度はイマイチでもプラ材でごりごりやったほうがなんだかんだ早い部分も多いんですよね。
でもこういうのはやっぱCAD設計ならでは。ギアボックス付属のクランクプレートにぴったりフィットです。

メインの歩行機構に同期して、このカムで機体を上下にローリングさせる作戦。思った以上にきれいにハマってご満悦ですが、厚みをミスってたのでこのあとやり直したり…。
んで、組んでみるとこう。

さらに全体組むとこう。

機体をまるごと上下させるのにトルクが足りるか若干不安だったのですが、計ってみると機体自体は100gもないし低速ギアでトルクはマシマシになってるので、なんてことありませんでした。
お気づきのとおり前回動画では上下のローリングは手動だったんですけど、これで晴れてハンズフリーで全体が動作するようになった…ハズ!
ということで満を持してスイッチオン!
……が。
なんかおかしい!
これもまた零式ヘッドでさんざん経験したことですが、仮組み時は遊びのおかげでどうにかなってた部分がいざ固定するとガチガチでマトモに動かないやつ…。最悪パーツから作り直しも覚悟しなければですが、まずは何がどう干渉してどこが悪さをしてるのかを検証する必要がありますね。
これは最初からそうなんですけど、どうも左脚が右脚に比べてスムーズじゃないんだよなぁ…。
やってみたかったことができるかどうかやってみよ、で始めたこのプロジェクトですが、ここまで想定を遥かに超えてうまいこといってました。ここにきて一気にハードルが上がってる感じですが、はてさてどうなりますやら。
ではまた次回。
まずは前回ちらっと書いた機体の支持方法から。
うだうだ悩んでたのは、当初プランでは腰の回転をフリーにして、歩行に合わせて少し腰を捻るようにしたら自然な動きになるんじゃないかと考えてたからです。それを実現するには腰より上で上半身を固定し、下半身が回転できるよう軸を設ける必要がありました。
が、ここまでの動作テストを振り返ると、可動部が増えて動作の確実性が損なわれるのであまり現実的じゃないなというのと、むしろ真っ直ぐ歩かせる方がメカっぽさが出ていいんじゃないかなと。
そうなれば、上半身と下半身、つまり腰と股関節とを別個に動かす必要がなくなります。シンプルに股関節ブロックの後方下面から真鍮線をぶっ刺す形に落ち着きました。つまんない結末ですが。
さっそく股関節ブロックをまたバラします。

左右分割の股関節を前後のパーツがしっかり固定してくれる構造なのでありがたい。
寸法を測ると、内部の空洞幅がちょうど5mmだったので、ここに5mmのプラ角棒を配します。
プラ棒に穿孔し、外装にも穴を穿けて真鍮線を突き刺せるように加工。それなりの重量がかかるので真鍮線はφ2mmです。
一方、それをさらに支えるベースブロックの構造体も作っていかなければなりません。
ということで、ヒヒ〜ン。お馬さんのようなこれ。

四つ脚のフレームをプラ材をあれこれして組み上げました。
こういうの、位置関係のクリアランスとか強度とか精度とか、いろいろと考慮しなきゃいけないことが多くてとても面倒くさく手間がかかるわりに、仕上がりが地味なのでなかなか進みません。
さらに、零式ヘッドの時に痛感しましたが、電動ギミックの構造部はとにかくいかにガッチリと固定できるか、いかに「バラして組んで」がやりやすいか、がキモ。ビス止め構造を仕込んでいきます。

この六角ナットをプラ材で固定する作業も地味でなかなかやる気でないですが。
ご覧の通り「パンの袋を止めるやつ」を有効活用。よく言われるとおり、プラモ用接着剤が効くので、こういうちょっとした部分にちょうど良いんですよね。一生分ぐらい溜め込んでるので使い切れる気がしませんけど。
んで、こう。
さらにネジ穴を貫通させてギアボックスまで一体で固定できるようにしました。
そして、3D設計&プリントしてこんなものを造形。
こういう形って、いかにも「3Dプリンタ使いました感」あっていいですよね(笑)。
せっかくできる環境あるんだから、だったらギミック全部まるごと3D設計したらいいんじゃね?って気になりますが。じつは最初それもやりかけたんですけど、、精度はイマイチでもプラ材でごりごりやったほうがなんだかんだ早い部分も多いんですよね。
でもこういうのはやっぱCAD設計ならでは。ギアボックス付属のクランクプレートにぴったりフィットです。

メインの歩行機構に同期して、このカムで機体を上下にローリングさせる作戦。思った以上にきれいにハマってご満悦ですが、厚みをミスってたのでこのあとやり直したり…。
んで、組んでみるとこう。
さらに全体組むとこう。
機体をまるごと上下させるのにトルクが足りるか若干不安だったのですが、計ってみると機体自体は100gもないし低速ギアでトルクはマシマシになってるので、なんてことありませんでした。
お気づきのとおり前回動画では上下のローリングは手動だったんですけど、これで晴れてハンズフリーで全体が動作するようになった…ハズ!
ということで満を持してスイッチオン!
……が。
なんかおかしい!
これもまた零式ヘッドでさんざん経験したことですが、仮組み時は遊びのおかげでどうにかなってた部分がいざ固定するとガチガチでマトモに動かないやつ…。最悪パーツから作り直しも覚悟しなければですが、まずは何がどう干渉してどこが悪さをしてるのかを検証する必要がありますね。
これは最初からそうなんですけど、どうも左脚が右脚に比べてスムーズじゃないんだよなぁ…。
やってみたかったことができるかどうかやってみよ、で始めたこのプロジェクトですが、ここまで想定を遥かに超えてうまいこといってました。ここにきて一気にハードルが上がってる感じですが、はてさてどうなりますやら。
ではまた次回。
1/72ハンニバル-3:地平の作成と足首改修 [コトブキヤ 1/72ハンニバル]
なんか体調がいまひとつなんですけど、もけいモチベは絶好調なのでガシガシ進めます。
前回からの宿題、まずは地平面の用意から。
特にひねり無く、t1.0mmのプラ板です。駆動用の真鍮線が通るスリットを2本開けたのみ。
あんまり馬鹿でかいベースにすると置き場所に困るのと「その場歩き」感が増すよなぁ、ということで、動いてもはみ出さない程度の最低限のサイズに。
一旦スクエアにしてますが、角はがっつり落とすのもありだよな、と思ったりしつつ、まぁ先の話。
当たり前ですがやっぱり地面があると歩いてるっぽくなってきますね。とはいえまだまだぎこちないのと、固定してないもんだからブレがすごくてよく分からない…。
ただこれが、足だけだと思った以上にスムーズなんですよ。ちょっと面白いので見て下さい。
再生できない場合、ダウンロードは🎥こちら
そして足首まわりの調整です。
爪先が下がりすぎないように後方への可動域を制限したのと併せて、逆にぐっと踏み込めるように足の甲と干渉する脚の内側を削りました。ここの干渉部の改修は、ギミック関係なくフツーに作る時もやった方がいい気がします。
これは個人の解釈というか好みかとも思いますが、ハンニバルとかブルドッグのように完全に人型じゃないプロポーションのレイバーって、ちょっと膝曲げて重心を低めに立ってるイメージで。設定だとわりと直立してますけど。いや、このバランスですっくと立ってスタスタ歩くのなんか変じゃない?っていう個人の感想です。
なので、模型でも腰を落とした感じにしてやりたいとこなんですけど、このハンニバルもモデ版ブルドッグも足首の可動域が足りなくて出来ないんですよね。特にハンニバルにはせっかく踏ん張ったポーズ用の股関節ブロックまでついてくるのに、足首のせいでいまいちキマらないのが唯一の残念ポイントです。
そもそもハンニバル、膝から下のデザインもあいまっていわゆるトリ脚っぽく錯覚しちゃいそうなラインで描かれてる画稿もあって、後ろにひっくり返りそうで不安になります。
っていう毎度のどうでもいい話はおいといて、組み上げ動作テスト。
再生できない場合、ダウンロードは🎥こちら
良くなってる気はしますけど、やっぱりちゃんと固定しないとぜんぜん分かりませんな(笑)。
微調整の余地はあるにせよ、脚部の動きに関してはこんなものかなと思いますので、ベース周りの構造を詰めていきつつ、本体の支持方法を考えましょう。
本体は、背後から腰の関節を支える感じにしたかったんですけど、改めて上半身を組み付けてみたらバックパック?がかなり下まで伸びてて、迂回しないと腰に届きません。
股間から真下に支柱が伸びるのはあんまり見栄えよくないからやりたくないし、背面の見た目を考えるとバックパックから支柱が生えるのも避けたい。支柱は支柱で脚に合わせて可動させる必要がありますから、腰への支柱が複数回折れ曲がる形はいろいろと問題がありそうだし…。
意外と脚を動かすより難しいかも知れませんぞ。
ではまた次回。
前回からの宿題、まずは地平面の用意から。

特にひねり無く、t1.0mmのプラ板です。駆動用の真鍮線が通るスリットを2本開けたのみ。
あんまり馬鹿でかいベースにすると置き場所に困るのと「その場歩き」感が増すよなぁ、ということで、動いてもはみ出さない程度の最低限のサイズに。
一旦スクエアにしてますが、角はがっつり落とすのもありだよな、と思ったりしつつ、まぁ先の話。
当たり前ですがやっぱり地面があると歩いてるっぽくなってきますね。とはいえまだまだぎこちないのと、固定してないもんだからブレがすごくてよく分からない…。
ただこれが、足だけだと思った以上にスムーズなんですよ。ちょっと面白いので見て下さい。
再生できない場合、ダウンロードは🎥こちら
そして足首まわりの調整です。
爪先が下がりすぎないように後方への可動域を制限したのと併せて、逆にぐっと踏み込めるように足の甲と干渉する脚の内側を削りました。ここの干渉部の改修は、ギミック関係なくフツーに作る時もやった方がいい気がします。
これは個人の解釈というか好みかとも思いますが、ハンニバルとかブルドッグのように完全に人型じゃないプロポーションのレイバーって、ちょっと膝曲げて重心を低めに立ってるイメージで。設定だとわりと直立してますけど。いや、このバランスですっくと立ってスタスタ歩くのなんか変じゃない?っていう個人の感想です。
なので、模型でも腰を落とした感じにしてやりたいとこなんですけど、このハンニバルもモデ版ブルドッグも足首の可動域が足りなくて出来ないんですよね。特にハンニバルにはせっかく踏ん張ったポーズ用の股関節ブロックまでついてくるのに、足首のせいでいまいちキマらないのが唯一の残念ポイントです。
そもそもハンニバル、膝から下のデザインもあいまっていわゆるトリ脚っぽく錯覚しちゃいそうなラインで描かれてる画稿もあって、後ろにひっくり返りそうで不安になります。
っていう毎度のどうでもいい話はおいといて、組み上げ動作テスト。
再生できない場合、ダウンロードは🎥こちら
良くなってる気はしますけど、やっぱりちゃんと固定しないとぜんぜん分かりませんな(笑)。
微調整の余地はあるにせよ、脚部の動きに関してはこんなものかなと思いますので、ベース周りの構造を詰めていきつつ、本体の支持方法を考えましょう。
本体は、背後から腰の関節を支える感じにしたかったんですけど、改めて上半身を組み付けてみたらバックパック?がかなり下まで伸びてて、迂回しないと腰に届きません。
股間から真下に支柱が伸びるのはあんまり見栄えよくないからやりたくないし、背面の見た目を考えるとバックパックから支柱が生えるのも避けたい。支柱は支柱で脚に合わせて可動させる必要がありますから、腰への支柱が複数回折れ曲がる形はいろいろと問題がありそうだし…。
意外と脚を動かすより難しいかも知れませんぞ。
ではまた次回。
1/72ハンニバル-2:足首可動と膝関節の改修 [コトブキヤ 1/72ハンニバル]
コトブキヤのハンニバルを疑似歩行させるチャレンジ続き。
まずは前回からの宿題で足首関節の可動?化から。

ポリキャップがハマってたところに軸可動の関節を新造してはめ込みます。
例によってスナップフィット。
内部のダボをちょびっとだけ削ってはいますが、きれいに収まりました。

まぁどうせ見えない部分なのでこんなもんでよかろ。
これで足首も無事にぷらんぷらんになりました。
そして、とりあえずの動作テストのため、仮でつけてた踵の駆動用ヒンジ。

ここが仮すぎて引っかかってるような気もするな、と思いつつ本番加工へ。
こう。

軸可動のヒンジを内蔵して、スリットを通して動かす形です。
後ろからは丸見えなので目立たないってことはないですが、見えても恥ずかしくない程度にはスッキリと収まりましたね。
前回ちょっとぎこちなさがあった膝関節、よくよく見たら、上下の長さが妙にアンバランスだったので改修しました。
元の二重関節のダボに対して、真ん中へんに軸を配置したつもりがなぜか下に寄ってました。そういえば、作ってる途中で下側のブロックが想定より3mmほど長くて「おっかしいな〜」と思いながら切り飛ばしたんですよ。長すぎたのは下じゃなくて上だったってことです。なにやってんだか。
ただ、賢明な方はお気づきでしょう。
この膝関節、ぎこちないどころかこれではそもそも曲がるワケがないんですよ。
二重関節のポリキャップを排したとはいえ、間接カバーがダボと噛み合ってるのでパーツの位置関係は維持できる、というのは前回書いた通りです。ということは、実質的には元通り関節があるのとパーツの干渉具合は変わらないわけで、そこに別途1軸の関節を追加するとどうなるか。元の2軸+追加の1軸で三角形を形成してしまいますよね。遊びの分どうにか動いてるように見えてましたが、3つの頂点を固定されたヒンジ構造が動くわけないんです。なぜ最初から気付かない…。
ということで、下はなくなると間接カバーがずり落ちてしまうので支えに残しつつ、上のダボを半分ほど削り飛ばすことで間接カバーパーツの可動域を確保しました。
で、改めて動作テストです。
再生できない場合、ダウンロードは🎥こちら
ん〜。
足首が動くようになったので前回よりは自然に…なったようにも見えますが、逆に爪先が垂れ下がってしまってます。そのため、足首の可動域に力が逃げてしまってて、膝が想定ほど曲がってない。
ぷらんぷらん化した関節に、今度は逆に可動域の制限をかけてやる必要がありますね。
さらに最大の要因はといえば、地面がないことです。言葉通り、地に足が付けばもう少し落ち着くはず。もとより、爪先は地面に接することで角度をキープする想定です。
地面を作るということは、これまでやってこなかったビネット的なミニジオラマのベースを作るに等しいので、どういう構造にするのがよいかちょっと思案どころではありますが、とりあえずやってみましょう。
ではまた次回。
まずは前回からの宿題で足首関節の可動?化から。

ポリキャップがハマってたところに軸可動の関節を新造してはめ込みます。
例によってスナップフィット。
内部のダボをちょびっとだけ削ってはいますが、きれいに収まりました。

まぁどうせ見えない部分なのでこんなもんでよかろ。
これで足首も無事にぷらんぷらんになりました。
そして、とりあえずの動作テストのため、仮でつけてた踵の駆動用ヒンジ。

ここが仮すぎて引っかかってるような気もするな、と思いつつ本番加工へ。
こう。

軸可動のヒンジを内蔵して、スリットを通して動かす形です。
後ろからは丸見えなので目立たないってことはないですが、見えても恥ずかしくない程度にはスッキリと収まりましたね。
前回ちょっとぎこちなさがあった膝関節、よくよく見たら、上下の長さが妙にアンバランスだったので改修しました。

元の二重関節のダボに対して、真ん中へんに軸を配置したつもりがなぜか下に寄ってました。そういえば、作ってる途中で下側のブロックが想定より3mmほど長くて「おっかしいな〜」と思いながら切り飛ばしたんですよ。長すぎたのは下じゃなくて上だったってことです。なにやってんだか。
ただ、賢明な方はお気づきでしょう。
この膝関節、ぎこちないどころかこれではそもそも曲がるワケがないんですよ。
二重関節のポリキャップを排したとはいえ、間接カバーがダボと噛み合ってるのでパーツの位置関係は維持できる、というのは前回書いた通りです。ということは、実質的には元通り関節があるのとパーツの干渉具合は変わらないわけで、そこに別途1軸の関節を追加するとどうなるか。元の2軸+追加の1軸で三角形を形成してしまいますよね。遊びの分どうにか動いてるように見えてましたが、3つの頂点を固定されたヒンジ構造が動くわけないんです。なぜ最初から気付かない…。
ということで、下はなくなると間接カバーがずり落ちてしまうので支えに残しつつ、上のダボを半分ほど削り飛ばすことで間接カバーパーツの可動域を確保しました。
で、改めて動作テストです。
再生できない場合、ダウンロードは🎥こちら
ん〜。
足首が動くようになったので前回よりは自然に…なったようにも見えますが、逆に爪先が垂れ下がってしまってます。そのため、足首の可動域に力が逃げてしまってて、膝が想定ほど曲がってない。
ぷらんぷらん化した関節に、今度は逆に可動域の制限をかけてやる必要がありますね。
さらに最大の要因はといえば、地面がないことです。言葉通り、地に足が付けばもう少し落ち着くはず。もとより、爪先は地面に接することで角度をキープする想定です。
地面を作るということは、これまでやってこなかったビネット的なミニジオラマのベースを作るに等しいので、どういう構造にするのがよいかちょっと思案どころではありますが、とりあえずやってみましょう。
ではまた次回。



