1/72ハンニバル-6:支持アーム修正と諸々の検証 [コトブキヤ 1/72ハンニバル]
3歩進んで5歩下がる。
次々と問題が発覚しております。
ただ、ちゃんと発覚してるだけ良くて、問題点が分かってさえいれば対処できます。どこが問題か分かんないのが一番マズイ。
引き続きアレコレやってる膝関節以前に、前々回で組んだ機体本体の支持アームに問題がありました。
真鍮線もφ2.0mmともなれば手加工も大変なのであまりやり直したくはないんですが、どうも機体の固定位置が後ろに寄りすぎてる。
リンク機構の動作レンジに対してセンターの直上に股関節の軸がくるようにしてて、実際そうなってはいるんですが…、おかし〜な〜計算間違えてないハズなんだけどな〜。としばし現物と採寸メモと睨めっこしてようやく間違いに気付きました。
リンク機構は踵に接続してますので、動作レンジのセンターは「踵の」動作中央位置。踵は股関節より後ろにありますから、踵が来るはずの位置に股関節を合わせたら当然その分機体がまるっと後ろにズレるはずです。馬鹿なの?
自分に呆れつつ作り直したら今度は加工時に測り間違えたのでもっかい作り直し…たらまた間違えて修正修正…。さらに採寸と加工のブレによる誤差を微調整すること数回。ようやく、本来の位置に固定することができた…ハズです。

で、前回からの宿題に戻りまして、膝関節リメイクの続きです。
軸位置をちょっとずつ変えて2パターンほど試してみましたが、ずらしていくほどに可動範囲は狭くなっていくので、やっぱり元の位置がベストな模様。テキトーにやってるようで、それなりにちゃんと考えて設計してあったみたいですね。
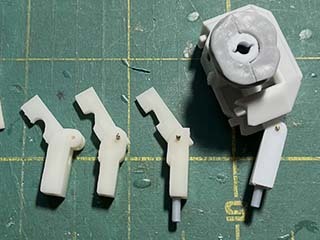
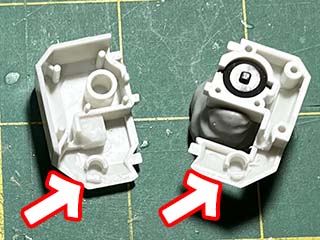
要は逆関節方向にスタックすることがなくなれば良いので、であれば関節が逆に曲がらないようロックを設けてやればいいのでは…?という単純なことにようやく気付きましたので、元の軸位置を維持したままリメイクしました。真ん中のが最新版です。
(ア、上の画像、右のパーツだけ左右逆です…)
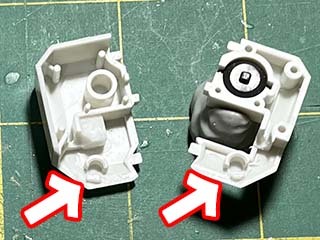
上部にクリアランス確保のための切り欠きがありますけど、改めて確認したらこれが全く意味をなしてないことが判明し、太股パーツの内部をゴリゴリ削ってやったりもしつつ。
本体の固定位置も正しくなったので、作り直した膝も組み直して改めて動作テスト。今度こそうまくいく…かと思いきや、問題がより明確になっていく一方です。主に…
・膝の曲げ方向への可動範囲がまだ足りない。
・足首の前方への可動範囲がまだ足りない。
というのが現状。
いやそれ事実上大事なとこ全部じゃないか、と思いますが、ギアボックスを中心とした駆動ギミックのコア周りにいまのところ大きな問題が発生していないのが救いですね。
関節の可動範囲が足りないのは、元デザインやキット造形による制約もありますが、「歩幅」をかなりギリギリまで欲張ってるせいもありそう。やっぱり動かす以上はダイナミックに動いて欲しいですし、足先だけちょこちょこ動いてるのカッコ悪いしね、ということで、ちょっとオーバーなぐらいにレンジを広めにとってますので、いざ完成したらちょっとやり過ぎ感が出ちゃうかも知れません。
チェビシェフリンクは各アームの比率が決まってるため、万が一歩幅を変えることになった際は、駆動部がまるっと作り直しになります。やり過ぎ感も味としてうまく収まってくれるといいのですが。
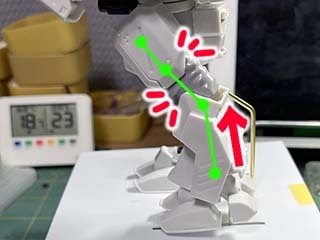
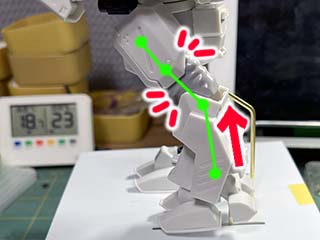
しかし膝関節はともかく、足首の可動範囲の足りてなさは想定以上です。後ろに足を引く時、股関節よりちょっと後ろに行っただけでもうスタックしますので、かなりの可動範囲拡大が必要です。

ここが引っかかって膝位置が下がらないまま太ももが後ろに引っ張られるため、例の膝の逆関節問題が発生してしまう模様。改修策はいくつか思いつくので、どれが最適かは元パーツの形状も踏まえて検討しましょう。
などなど、あれこれやってる間に、ふと思ってしまったんです。
そもそもなんで、せっかくキットで二重関節になってる膝を一軸にダウングレードしてるんだ…? もとの二重関節のままぷらんぷらんにしてやれば、膝の可動範囲問題は解決では…?
とんだコペルニクス的転回!?
いやマジ解説しますと、なぜかといえばさっきも書いたばかりの逆関節状態の発生が理由です。二重関節がそれぞれS字状態で逆方向に曲がったら当然スタックしますから、それを避けるためにはシンプルな一軸可動が安全、という判断だったんですよね。
しかし今回やってみたように、そもそも逆に曲がらないようにしてやれば、そのリスクは考慮する必要がなくなりますから、だったら可動域の確保のためには元通り二重関節構造のほうが望ましい気がしてきます。
数日分の作業がまるっと無駄になるんですが…、まぁやってみて気付くことも少なくはない、ということで。
気を取り直してまたも3D設計。

膝関節の「骨」を作りました。
ただしコレが嵌まるべき元のダボは、膝下は生きてますが膝上のを半ば削り飛ばしてしまってます…。
元通りパイプ状に再生しようとすると結構な手間ですが、半分残ってるので軸が下に落ちさえしなければと、プラ材で「ストッパー」を設けてダボを復活させました。強度に若干の不安が残りはしますがひとまずこれで。
んで、組んで動作させてみて、こう。

上述の足首可動が足りてない問題、キットのパーツ構成としては膝下の関節が敢えて逆関節状態になることでクリアする設計になってるようですね。道理でやけに関節部の膝下がスカスカだと思いました。と、元の可動範囲をちゃんと検証せずに加工を始めてしまったので、今更把握。
この状態でもマトモに動く時は動くんですが、逆関節状態が前提ということはやっぱり時々こうなってしまいます。
あちらを立てればこちらが立たず。が、冒頭の言葉通り、明らかになった問題は順に潰していけばいいだけ、のハズ。
以上の検証を踏まえて整理しますと…
・膝はキット通り二重関節に戻すことで可動範囲を確保できそう。
・ただし膝が逆関節にならないよう可動範囲を制限する必要あり。
・結果、膝でカバーできないので足首関節の可動範囲拡大は必要。
ということに。
複数の関節が同時に可動するギミックは、やっぱり問題の切り分けと検証もスムーズにはいきませんね、とか思いますが半分ぐらいは自分の考え足らずなのでお恥ずかしい限りです。
そして実は、後ろに引いた足を蹴り上げる際に爪先が地平面に引っかかる、っていう症状も確認しているんですが、これは膝と足首の可動範囲拡大で解消できるような気がしています。

でも爪先が別途可動するとそれはそれでより自然なモーションになる気がしますんで、迷うところです。とか言って、膝と足首の改修で解消されなければ改造せざるを得ませんし、その場合さらに可動部が増えることでどう動くのか全く分かりませんけど。どうなりますやら。
作業自体は大して進んでないくせに無駄になげーな今回…。
ではまた次回。
次々と問題が発覚しております。
ただ、ちゃんと発覚してるだけ良くて、問題点が分かってさえいれば対処できます。どこが問題か分かんないのが一番マズイ。
引き続きアレコレやってる膝関節以前に、前々回で組んだ機体本体の支持アームに問題がありました。
真鍮線もφ2.0mmともなれば手加工も大変なのであまりやり直したくはないんですが、どうも機体の固定位置が後ろに寄りすぎてる。
リンク機構の動作レンジに対してセンターの直上に股関節の軸がくるようにしてて、実際そうなってはいるんですが…、おかし〜な〜計算間違えてないハズなんだけどな〜。としばし現物と採寸メモと睨めっこしてようやく間違いに気付きました。
リンク機構は踵に接続してますので、動作レンジのセンターは「踵の」動作中央位置。踵は股関節より後ろにありますから、踵が来るはずの位置に股関節を合わせたら当然その分機体がまるっと後ろにズレるはずです。馬鹿なの?
自分に呆れつつ作り直したら今度は加工時に測り間違えたのでもっかい作り直し…たらまた間違えて修正修正…。さらに採寸と加工のブレによる誤差を微調整すること数回。ようやく、本来の位置に固定することができた…ハズです。

で、前回からの宿題に戻りまして、膝関節リメイクの続きです。
軸位置をちょっとずつ変えて2パターンほど試してみましたが、ずらしていくほどに可動範囲は狭くなっていくので、やっぱり元の位置がベストな模様。テキトーにやってるようで、それなりにちゃんと考えて設計してあったみたいですね。
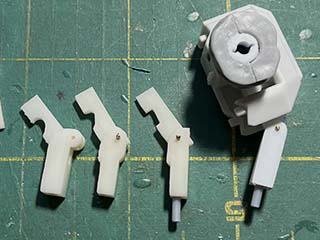
要は逆関節方向にスタックすることがなくなれば良いので、であれば関節が逆に曲がらないようロックを設けてやればいいのでは…?という単純なことにようやく気付きましたので、元の軸位置を維持したままリメイクしました。真ん中のが最新版です。
(ア、上の画像、右のパーツだけ左右逆です…)
上部にクリアランス確保のための切り欠きがありますけど、改めて確認したらこれが全く意味をなしてないことが判明し、太股パーツの内部をゴリゴリ削ってやったりもしつつ。
本体の固定位置も正しくなったので、作り直した膝も組み直して改めて動作テスト。今度こそうまくいく…かと思いきや、問題がより明確になっていく一方です。主に…
・膝の曲げ方向への可動範囲がまだ足りない。
・足首の前方への可動範囲がまだ足りない。
というのが現状。
いやそれ事実上大事なとこ全部じゃないか、と思いますが、ギアボックスを中心とした駆動ギミックのコア周りにいまのところ大きな問題が発生していないのが救いですね。
関節の可動範囲が足りないのは、元デザインやキット造形による制約もありますが、「歩幅」をかなりギリギリまで欲張ってるせいもありそう。やっぱり動かす以上はダイナミックに動いて欲しいですし、足先だけちょこちょこ動いてるのカッコ悪いしね、ということで、ちょっとオーバーなぐらいにレンジを広めにとってますので、いざ完成したらちょっとやり過ぎ感が出ちゃうかも知れません。
チェビシェフリンクは各アームの比率が決まってるため、万が一歩幅を変えることになった際は、駆動部がまるっと作り直しになります。やり過ぎ感も味としてうまく収まってくれるといいのですが。
しかし膝関節はともかく、足首の可動範囲の足りてなさは想定以上です。後ろに足を引く時、股関節よりちょっと後ろに行っただけでもうスタックしますので、かなりの可動範囲拡大が必要です。

ここが引っかかって膝位置が下がらないまま太ももが後ろに引っ張られるため、例の膝の逆関節問題が発生してしまう模様。改修策はいくつか思いつくので、どれが最適かは元パーツの形状も踏まえて検討しましょう。
などなど、あれこれやってる間に、ふと思ってしまったんです。
そもそもなんで、せっかくキットで二重関節になってる膝を一軸にダウングレードしてるんだ…? もとの二重関節のままぷらんぷらんにしてやれば、膝の可動範囲問題は解決では…?
とんだコペルニクス的転回!?
いやマジ解説しますと、なぜかといえばさっきも書いたばかりの逆関節状態の発生が理由です。二重関節がそれぞれS字状態で逆方向に曲がったら当然スタックしますから、それを避けるためにはシンプルな一軸可動が安全、という判断だったんですよね。
しかし今回やってみたように、そもそも逆に曲がらないようにしてやれば、そのリスクは考慮する必要がなくなりますから、だったら可動域の確保のためには元通り二重関節構造のほうが望ましい気がしてきます。
数日分の作業がまるっと無駄になるんですが…、まぁやってみて気付くことも少なくはない、ということで。
気を取り直してまたも3D設計。

膝関節の「骨」を作りました。
ただしコレが嵌まるべき元のダボは、膝下は生きてますが膝上のを半ば削り飛ばしてしまってます…。
元通りパイプ状に再生しようとすると結構な手間ですが、半分残ってるので軸が下に落ちさえしなければと、プラ材で「ストッパー」を設けてダボを復活させました。強度に若干の不安が残りはしますがひとまずこれで。
んで、組んで動作させてみて、こう。

上述の足首可動が足りてない問題、キットのパーツ構成としては膝下の関節が敢えて逆関節状態になることでクリアする設計になってるようですね。道理でやけに関節部の膝下がスカスカだと思いました。と、元の可動範囲をちゃんと検証せずに加工を始めてしまったので、今更把握。
この状態でもマトモに動く時は動くんですが、逆関節状態が前提ということはやっぱり時々こうなってしまいます。
あちらを立てればこちらが立たず。が、冒頭の言葉通り、明らかになった問題は順に潰していけばいいだけ、のハズ。
以上の検証を踏まえて整理しますと…
・膝はキット通り二重関節に戻すことで可動範囲を確保できそう。
・ただし膝が逆関節にならないよう可動範囲を制限する必要あり。
・結果、膝でカバーできないので足首関節の可動範囲拡大は必要。
ということに。
複数の関節が同時に可動するギミックは、やっぱり問題の切り分けと検証もスムーズにはいきませんね、とか思いますが半分ぐらいは自分の考え足らずなのでお恥ずかしい限りです。
そして実は、後ろに引いた足を蹴り上げる際に爪先が地平面に引っかかる、っていう症状も確認しているんですが、これは膝と足首の可動範囲拡大で解消できるような気がしています。

でも爪先が別途可動するとそれはそれでより自然なモーションになる気がしますんで、迷うところです。とか言って、膝と足首の改修で解消されなければ改造せざるを得ませんし、その場合さらに可動部が増えることでどう動くのか全く分かりませんけど。どうなりますやら。
作業自体は大して進んでないくせに無駄になげーな今回…。
ではまた次回。




ここに一歩進んで左に曲がって下がりつつ10年休眠する人が
いるので五歩位なら全然問題ないすな(笑)
本体支え、自分ならどうするかな~と考えたら透明パネルを
後ろに置いて縦スリット入れてそこに透明棒等を本体背中あたりに
接続するかなと。
前後にぶれないように棒にパネルサンドチッチで完成と。
まあ空論なので動かしたらガキキィかもですが(笑)
by yan (2022-02-05 21:56)
>yanさま
次なる大きな一歩が楽しみです(笑)。
支柱とか、こういう見せたくない部分をどう処理するかは、定番手法もいくつかありますが個人のスタイル出ますね。
透明パネル式もおもしろそうです。
by nuke_sve (2022-02-06 01:16)