1/72ハンニバル-2:足首可動と膝関節の改修 [コトブキヤ 1/72ハンニバル]
コトブキヤのハンニバルを疑似歩行させるチャレンジ続き。
まずは前回からの宿題で足首関節の可動?化から。

ポリキャップがハマってたところに軸可動の関節を新造してはめ込みます。
例によってスナップフィット。
内部のダボをちょびっとだけ削ってはいますが、きれいに収まりました。

まぁどうせ見えない部分なのでこんなもんでよかろ。
これで足首も無事にぷらんぷらんになりました。
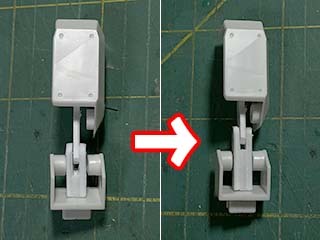
そして、とりあえずの動作テストのため、仮でつけてた踵の駆動用ヒンジ。

ここが仮すぎて引っかかってるような気もするな、と思いつつ本番加工へ。
こう。

軸可動のヒンジを内蔵して、スリットを通して動かす形です。
後ろからは丸見えなので目立たないってことはないですが、見えても恥ずかしくない程度にはスッキリと収まりましたね。
前回ちょっとぎこちなさがあった膝関節、よくよく見たら、上下の長さが妙にアンバランスだったので改修しました。
元の二重関節のダボに対して、真ん中へんに軸を配置したつもりがなぜか下に寄ってました。そういえば、作ってる途中で下側のブロックが想定より3mmほど長くて「おっかしいな〜」と思いながら切り飛ばしたんですよ。長すぎたのは下じゃなくて上だったってことです。なにやってんだか。
ただ、賢明な方はお気づきでしょう。
この膝関節、ぎこちないどころかこれではそもそも曲がるワケがないんですよ。
二重関節のポリキャップを排したとはいえ、間接カバーがダボと噛み合ってるのでパーツの位置関係は維持できる、というのは前回書いた通りです。ということは、実質的には元通り関節があるのとパーツの干渉具合は変わらないわけで、そこに別途1軸の関節を追加するとどうなるか。元の2軸+追加の1軸で三角形を形成してしまいますよね。遊びの分どうにか動いてるように見えてましたが、3つの頂点を固定されたヒンジ構造が動くわけないんです。なぜ最初から気付かない…。
ということで、下はなくなると間接カバーがずり落ちてしまうので支えに残しつつ、上のダボを半分ほど削り飛ばすことで間接カバーパーツの可動域を確保しました。
で、改めて動作テストです。
再生できない場合、ダウンロードは🎥こちら
ん〜。
足首が動くようになったので前回よりは自然に…なったようにも見えますが、逆に爪先が垂れ下がってしまってます。そのため、足首の可動域に力が逃げてしまってて、膝が想定ほど曲がってない。
ぷらんぷらん化した関節に、今度は逆に可動域の制限をかけてやる必要がありますね。
さらに最大の要因はといえば、地面がないことです。言葉通り、地に足が付けばもう少し落ち着くはず。もとより、爪先は地面に接することで角度をキープする想定です。
地面を作るということは、これまでやってこなかったビネット的なミニジオラマのベースを作るに等しいので、どういう構造にするのがよいかちょっと思案どころではありますが、とりあえずやってみましょう。
ではまた次回。
まずは前回からの宿題で足首関節の可動?化から。

ポリキャップがハマってたところに軸可動の関節を新造してはめ込みます。
例によってスナップフィット。
内部のダボをちょびっとだけ削ってはいますが、きれいに収まりました。

まぁどうせ見えない部分なのでこんなもんでよかろ。
これで足首も無事にぷらんぷらんになりました。
そして、とりあえずの動作テストのため、仮でつけてた踵の駆動用ヒンジ。

ここが仮すぎて引っかかってるような気もするな、と思いつつ本番加工へ。
こう。

軸可動のヒンジを内蔵して、スリットを通して動かす形です。
後ろからは丸見えなので目立たないってことはないですが、見えても恥ずかしくない程度にはスッキリと収まりましたね。
前回ちょっとぎこちなさがあった膝関節、よくよく見たら、上下の長さが妙にアンバランスだったので改修しました。

元の二重関節のダボに対して、真ん中へんに軸を配置したつもりがなぜか下に寄ってました。そういえば、作ってる途中で下側のブロックが想定より3mmほど長くて「おっかしいな〜」と思いながら切り飛ばしたんですよ。長すぎたのは下じゃなくて上だったってことです。なにやってんだか。
ただ、賢明な方はお気づきでしょう。
この膝関節、ぎこちないどころかこれではそもそも曲がるワケがないんですよ。
二重関節のポリキャップを排したとはいえ、間接カバーがダボと噛み合ってるのでパーツの位置関係は維持できる、というのは前回書いた通りです。ということは、実質的には元通り関節があるのとパーツの干渉具合は変わらないわけで、そこに別途1軸の関節を追加するとどうなるか。元の2軸+追加の1軸で三角形を形成してしまいますよね。遊びの分どうにか動いてるように見えてましたが、3つの頂点を固定されたヒンジ構造が動くわけないんです。なぜ最初から気付かない…。
ということで、下はなくなると間接カバーがずり落ちてしまうので支えに残しつつ、上のダボを半分ほど削り飛ばすことで間接カバーパーツの可動域を確保しました。
で、改めて動作テストです。
再生できない場合、ダウンロードは🎥こちら
ん〜。
足首が動くようになったので前回よりは自然に…なったようにも見えますが、逆に爪先が垂れ下がってしまってます。そのため、足首の可動域に力が逃げてしまってて、膝が想定ほど曲がってない。
ぷらんぷらん化した関節に、今度は逆に可動域の制限をかけてやる必要がありますね。
さらに最大の要因はといえば、地面がないことです。言葉通り、地に足が付けばもう少し落ち着くはず。もとより、爪先は地面に接することで角度をキープする想定です。
地面を作るということは、これまでやってこなかったビネット的なミニジオラマのベースを作るに等しいので、どういう構造にするのがよいかちょっと思案どころではありますが、とりあえずやってみましょう。
ではまた次回。




疑似とはいえこうやって歩行が進歩していく様は
本当にロボット製作しているようでワクワクしますな!
自分も現在こう改造すればを勢いでかまし途中でハッと
気付くアレタイム中なので・・・ その気持ちわかります。
ほんとあるある。
by yan (2022-01-29 23:15)
>yanさま
いい感じに盛り上がってきましたよ!
基本どれも現物合わせでエイヤなので、あ、ダメじゃん…ばっかりですが、ふんわり脳内設計だけで突っ走ってるからこそ着々と進んでいるとも。
by nuke_sve (2022-01-30 01:09)