1/72ハンニバル-5:股関節の改修と膝関節の問題点 [コトブキヤ 1/72ハンニバル]
ガッ…!ギギギギギ……バシャァッ!!
を繰り返しながら、マトモに動作しない歩行ギミックを検証。
結果、今更ながら意外な事実が判明しました。
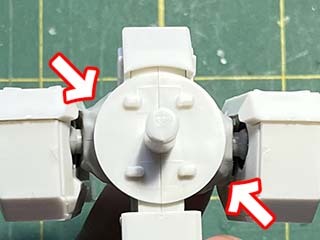
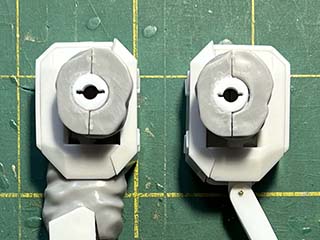
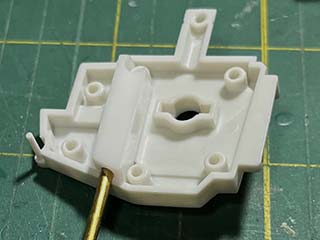
こちら、左脚の股関節ですが、関節パーツの上部が腰に干渉しています。

可動化改造に際して軸の位置は基本的に変えてませんので、確証はないですがおそらくキットの時点でこうなってる。
もともと股関節は外側にもうひとつポリキャップのBJ可動部があって二重関節状態なので、ここがスタックしても外側でカバーできるため目立たず、パチ組み段階ではそこまで気付いていなかった模様。かつ、改造で股間軸に若干の遊びが出てたので、ちょっと引っかかってもどうにか誤魔化せてしまっていたようで、本体を固定するまで発覚していませんでした。
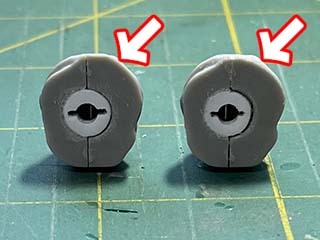
で、このパーツ、左右共通なんですよ。左右「対称」じゃなくて。インストに「×2」って書いてあるヤツ。
つまりこうなってます。

左脚の前側が干渉してるってことは、右脚は後ろ側に凸ってることに。
ほら。

どうりで、左右でひっかかり方が違うわけです。
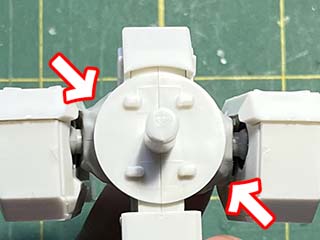
上から見るとよく分かります。
左は前が、右は後ろが出っ張っていて左右対称になってない。かつそれぞれ干渉してる、と。
なんでこんなことになってるのかといえば、まぁ本来まるっと埋まってるはずの関節部の見栄えと可動を両立させるためのバランスでしょうね。模型に限らずいろんなモノってだいたい「左前」「右後」から撮影することが多く、本キットもインストの完成図は例に漏れず「左前」「右後」からの写真。
ここがちょびっと出っ張ってるだけでそれなりに見た目に影響している気がします。
勝手な想像ですので、実際にそういう意図なのかは分かりませんけれども。
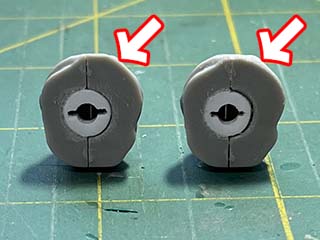
幸い肉厚な部分だったので、サクッと削りました。
左がBEFORE、右がAFTERです。
そこまで変わってませんがこれで股関節の干渉部分はクリア。
もう大丈夫やろ!と再度組み上げて電源ON。
ガッ…!ギギギギギ……バシャァッ!!
…。
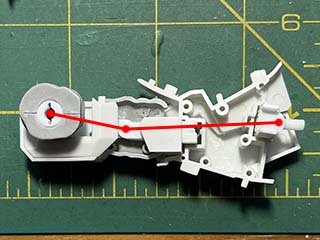
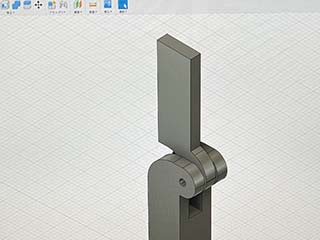
実はとっくに分かってたんですが(負け惜しみ)、自作した膝関節の位置に問題があります。こちらをご覧下さい。
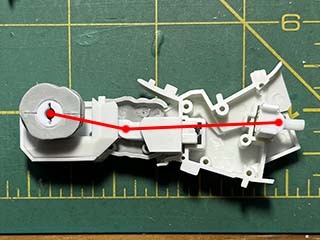
膝の関節が真っ直ぐに伸びた状態で、股間軸・膝・足首の各可動軸を結んだ図です。
画像上が前方なので、若干の「逆関節」になってしまってるのが一目瞭然。この状態にならないことのほうが多いはずではあるんですが、各関節を個別に駆動してるワケではないので何かの拍子にこうなってしまうことがしばしばあります。
今回の疑似歩行ギミックは、踵に接続した駆動軸で脚部を操作してますので、この状態で踵から股間軸に向かって力が働くと、膝が逆に押されてスタックするという当然の結果になるわけで。
これを解消するにはまぁご覧のとおり膝の関節位置をもう3〜4mm前にズラしてやる必要があるわけですが、たかが3mmされど3mm。そもそも関節が前寄りにあるとその分曲げた時に突き出すので、膝関節のカバーパーツと干渉するため、敢えてこの位置にしてたもの。これを前にずらしてギリのラインを探るのはなかなか難儀しそうですし、軸位置が変わるとそもそもこの辺の可動域ががらっと変わります。
それによって何がどうなるのかは、綿密なシミュレーションを行うか、とりあえずやってみるか、しかありません。
のでやってみるんですけど。
微調整の繰り返しになる可能性が高いので、いちいちプラ材で作るのはしんどいな〜…てことで、またまたFusion360でデジタル設計開始。
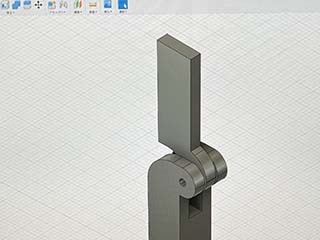
やっぱ最初から全部3Dでやればよかったんじゃ…とまた思うなど。
果たして各部もろもろのクリアランスを調整することはできるでしょうか。
ではまた次回。
を繰り返しながら、マトモに動作しない歩行ギミックを検証。
結果、今更ながら意外な事実が判明しました。
こちら、左脚の股関節ですが、関節パーツの上部が腰に干渉しています。

可動化改造に際して軸の位置は基本的に変えてませんので、確証はないですがおそらくキットの時点でこうなってる。
もともと股関節は外側にもうひとつポリキャップのBJ可動部があって二重関節状態なので、ここがスタックしても外側でカバーできるため目立たず、パチ組み段階ではそこまで気付いていなかった模様。かつ、改造で股間軸に若干の遊びが出てたので、ちょっと引っかかってもどうにか誤魔化せてしまっていたようで、本体を固定するまで発覚していませんでした。
で、このパーツ、左右共通なんですよ。左右「対称」じゃなくて。インストに「×2」って書いてあるヤツ。
つまりこうなってます。
左脚の前側が干渉してるってことは、右脚は後ろ側に凸ってることに。
ほら。

どうりで、左右でひっかかり方が違うわけです。
上から見るとよく分かります。
左は前が、右は後ろが出っ張っていて左右対称になってない。かつそれぞれ干渉してる、と。
なんでこんなことになってるのかといえば、まぁ本来まるっと埋まってるはずの関節部の見栄えと可動を両立させるためのバランスでしょうね。模型に限らずいろんなモノってだいたい「左前」「右後」から撮影することが多く、本キットもインストの完成図は例に漏れず「左前」「右後」からの写真。
ここがちょびっと出っ張ってるだけでそれなりに見た目に影響している気がします。
勝手な想像ですので、実際にそういう意図なのかは分かりませんけれども。
幸い肉厚な部分だったので、サクッと削りました。
左がBEFORE、右がAFTERです。
そこまで変わってませんがこれで股関節の干渉部分はクリア。
もう大丈夫やろ!と再度組み上げて電源ON。
ガッ…!ギギギギギ……バシャァッ!!
…。
実はとっくに分かってたんですが(負け惜しみ)、自作した膝関節の位置に問題があります。こちらをご覧下さい。
膝の関節が真っ直ぐに伸びた状態で、股間軸・膝・足首の各可動軸を結んだ図です。
画像上が前方なので、若干の「逆関節」になってしまってるのが一目瞭然。この状態にならないことのほうが多いはずではあるんですが、各関節を個別に駆動してるワケではないので何かの拍子にこうなってしまうことがしばしばあります。
今回の疑似歩行ギミックは、踵に接続した駆動軸で脚部を操作してますので、この状態で踵から股間軸に向かって力が働くと、膝が逆に押されてスタックするという当然の結果になるわけで。
これを解消するにはまぁご覧のとおり膝の関節位置をもう3〜4mm前にズラしてやる必要があるわけですが、たかが3mmされど3mm。そもそも関節が前寄りにあるとその分曲げた時に突き出すので、膝関節のカバーパーツと干渉するため、敢えてこの位置にしてたもの。これを前にずらしてギリのラインを探るのはなかなか難儀しそうですし、軸位置が変わるとそもそもこの辺の可動域ががらっと変わります。
それによって何がどうなるのかは、綿密なシミュレーションを行うか、とりあえずやってみるか、しかありません。
のでやってみるんですけど。
微調整の繰り返しになる可能性が高いので、いちいちプラ材で作るのはしんどいな〜…てことで、またまたFusion360でデジタル設計開始。
やっぱ最初から全部3Dでやればよかったんじゃ…とまた思うなど。
果たして各部もろもろのクリアランスを調整することはできるでしょうか。
ではまた次回。
1/72ハンニバル-4:本体支持部とローリングギミック [コトブキヤ 1/72ハンニバル]
前回までで「歩き」はなんとかなってきたので、もろもろちゃんと組み上げられるようにしていきます。
まずは前回ちらっと書いた機体の支持方法から。
うだうだ悩んでたのは、当初プランでは腰の回転をフリーにして、歩行に合わせて少し腰を捻るようにしたら自然な動きになるんじゃないかと考えてたからです。それを実現するには腰より上で上半身を固定し、下半身が回転できるよう軸を設ける必要がありました。
が、ここまでの動作テストを振り返ると、可動部が増えて動作の確実性が損なわれるのであまり現実的じゃないなというのと、むしろ真っ直ぐ歩かせる方がメカっぽさが出ていいんじゃないかなと。
そうなれば、上半身と下半身、つまり腰と股関節とを別個に動かす必要がなくなります。シンプルに股関節ブロックの後方下面から真鍮線をぶっ刺す形に落ち着きました。つまんない結末ですが。
さっそく股関節ブロックをまたバラします。

左右分割の股関節を前後のパーツがしっかり固定してくれる構造なのでありがたい。
寸法を測ると、内部の空洞幅がちょうど5mmだったので、ここに5mmのプラ角棒を配します。
プラ棒に穿孔し、外装にも穴を穿けて真鍮線を突き刺せるように加工。それなりの重量がかかるので真鍮線はφ2mmです。
一方、それをさらに支えるベースブロックの構造体も作っていかなければなりません。
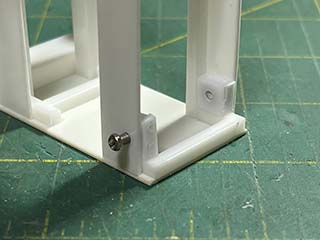
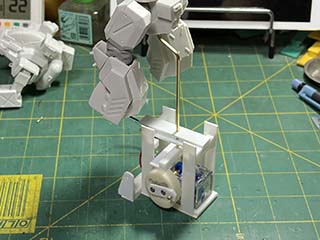
ということで、ヒヒ〜ン。お馬さんのようなこれ。

四つ脚のフレームをプラ材をあれこれして組み上げました。
こういうの、位置関係のクリアランスとか強度とか精度とか、いろいろと考慮しなきゃいけないことが多くてとても面倒くさく手間がかかるわりに、仕上がりが地味なのでなかなか進みません。
さらに、零式ヘッドの時に痛感しましたが、電動ギミックの構造部はとにかくいかにガッチリと固定できるか、いかに「バラして組んで」がやりやすいか、がキモ。ビス止め構造を仕込んでいきます。

この六角ナットをプラ材で固定する作業も地味でなかなかやる気でないですが。
ご覧の通り「パンの袋を止めるやつ」を有効活用。よく言われるとおり、プラモ用接着剤が効くので、こういうちょっとした部分にちょうど良いんですよね。一生分ぐらい溜め込んでるので使い切れる気がしませんけど。
んで、こう。
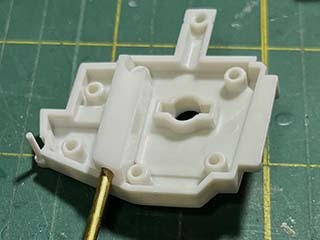
さらにネジ穴を貫通させてギアボックスまで一体で固定できるようにしました。
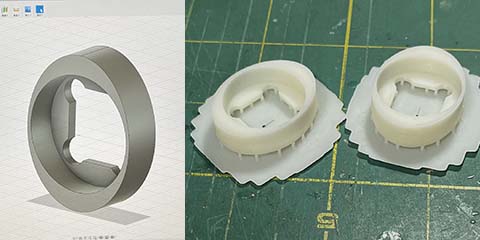
そして、3D設計&プリントしてこんなものを造形。
こういう形って、いかにも「3Dプリンタ使いました感」あっていいですよね(笑)。
せっかくできる環境あるんだから、だったらギミック全部まるごと3D設計したらいいんじゃね?って気になりますが。じつは最初それもやりかけたんですけど、、精度はイマイチでもプラ材でごりごりやったほうがなんだかんだ早い部分も多いんですよね。
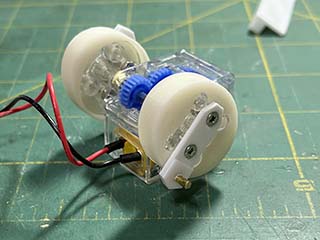
でもこういうのはやっぱCAD設計ならでは。ギアボックス付属のクランクプレートにぴったりフィットです。

メインの歩行機構に同期して、このカムで機体を上下にローリングさせる作戦。思った以上にきれいにハマってご満悦ですが、厚みをミスってたのでこのあとやり直したり…。
んで、組んでみるとこう。

さらに全体組むとこう。

機体をまるごと上下させるのにトルクが足りるか若干不安だったのですが、計ってみると機体自体は100gもないし低速ギアでトルクはマシマシになってるので、なんてことありませんでした。
お気づきのとおり前回動画では上下のローリングは手動だったんですけど、これで晴れてハンズフリーで全体が動作するようになった…ハズ!
ということで満を持してスイッチオン!
……が。
なんかおかしい!
これもまた零式ヘッドでさんざん経験したことですが、仮組み時は遊びのおかげでどうにかなってた部分がいざ固定するとガチガチでマトモに動かないやつ…。最悪パーツから作り直しも覚悟しなければですが、まずは何がどう干渉してどこが悪さをしてるのかを検証する必要がありますね。
これは最初からそうなんですけど、どうも左脚が右脚に比べてスムーズじゃないんだよなぁ…。
やってみたかったことができるかどうかやってみよ、で始めたこのプロジェクトですが、ここまで想定を遥かに超えてうまいこといってました。ここにきて一気にハードルが上がってる感じですが、はてさてどうなりますやら。
ではまた次回。
まずは前回ちらっと書いた機体の支持方法から。
うだうだ悩んでたのは、当初プランでは腰の回転をフリーにして、歩行に合わせて少し腰を捻るようにしたら自然な動きになるんじゃないかと考えてたからです。それを実現するには腰より上で上半身を固定し、下半身が回転できるよう軸を設ける必要がありました。
が、ここまでの動作テストを振り返ると、可動部が増えて動作の確実性が損なわれるのであまり現実的じゃないなというのと、むしろ真っ直ぐ歩かせる方がメカっぽさが出ていいんじゃないかなと。
そうなれば、上半身と下半身、つまり腰と股関節とを別個に動かす必要がなくなります。シンプルに股関節ブロックの後方下面から真鍮線をぶっ刺す形に落ち着きました。つまんない結末ですが。
さっそく股関節ブロックをまたバラします。

左右分割の股関節を前後のパーツがしっかり固定してくれる構造なのでありがたい。
寸法を測ると、内部の空洞幅がちょうど5mmだったので、ここに5mmのプラ角棒を配します。
プラ棒に穿孔し、外装にも穴を穿けて真鍮線を突き刺せるように加工。それなりの重量がかかるので真鍮線はφ2mmです。
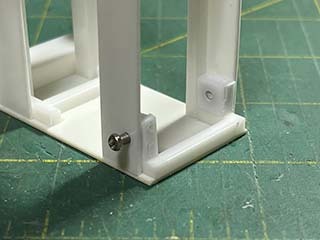
一方、それをさらに支えるベースブロックの構造体も作っていかなければなりません。
ということで、ヒヒ〜ン。お馬さんのようなこれ。

四つ脚のフレームをプラ材をあれこれして組み上げました。
こういうの、位置関係のクリアランスとか強度とか精度とか、いろいろと考慮しなきゃいけないことが多くてとても面倒くさく手間がかかるわりに、仕上がりが地味なのでなかなか進みません。
さらに、零式ヘッドの時に痛感しましたが、電動ギミックの構造部はとにかくいかにガッチリと固定できるか、いかに「バラして組んで」がやりやすいか、がキモ。ビス止め構造を仕込んでいきます。

この六角ナットをプラ材で固定する作業も地味でなかなかやる気でないですが。
ご覧の通り「パンの袋を止めるやつ」を有効活用。よく言われるとおり、プラモ用接着剤が効くので、こういうちょっとした部分にちょうど良いんですよね。一生分ぐらい溜め込んでるので使い切れる気がしませんけど。
んで、こう。
さらにネジ穴を貫通させてギアボックスまで一体で固定できるようにしました。
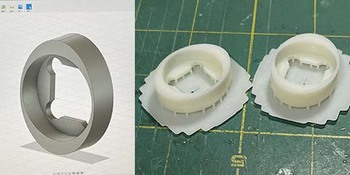
そして、3D設計&プリントしてこんなものを造形。
こういう形って、いかにも「3Dプリンタ使いました感」あっていいですよね(笑)。
せっかくできる環境あるんだから、だったらギミック全部まるごと3D設計したらいいんじゃね?って気になりますが。じつは最初それもやりかけたんですけど、、精度はイマイチでもプラ材でごりごりやったほうがなんだかんだ早い部分も多いんですよね。
でもこういうのはやっぱCAD設計ならでは。ギアボックス付属のクランクプレートにぴったりフィットです。

メインの歩行機構に同期して、このカムで機体を上下にローリングさせる作戦。思った以上にきれいにハマってご満悦ですが、厚みをミスってたのでこのあとやり直したり…。
んで、組んでみるとこう。
さらに全体組むとこう。
機体をまるごと上下させるのにトルクが足りるか若干不安だったのですが、計ってみると機体自体は100gもないし低速ギアでトルクはマシマシになってるので、なんてことありませんでした。
お気づきのとおり前回動画では上下のローリングは手動だったんですけど、これで晴れてハンズフリーで全体が動作するようになった…ハズ!
ということで満を持してスイッチオン!
……が。
なんかおかしい!
これもまた零式ヘッドでさんざん経験したことですが、仮組み時は遊びのおかげでどうにかなってた部分がいざ固定するとガチガチでマトモに動かないやつ…。最悪パーツから作り直しも覚悟しなければですが、まずは何がどう干渉してどこが悪さをしてるのかを検証する必要がありますね。
これは最初からそうなんですけど、どうも左脚が右脚に比べてスムーズじゃないんだよなぁ…。
やってみたかったことができるかどうかやってみよ、で始めたこのプロジェクトですが、ここまで想定を遥かに超えてうまいこといってました。ここにきて一気にハードルが上がってる感じですが、はてさてどうなりますやら。
ではまた次回。



