1/72ハンニバル-10:疑似歩行ギミックの微調整 [コトブキヤ 1/72ハンニバル]
追加ギミックは一旦置いといて。
ひとまず一連の動きが実現は出来たもののアレコレ要調整だった疑似歩行ギミックを改修していきます。
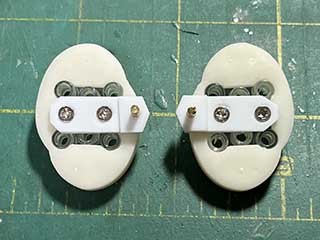
もろもろやった結果から。

まぁこの画像だけでは分かりませんわな。
まずは本体を上下ローリグさせるカムの形状変更から。
何度かRのキツさを変えたりしてみてましたが、今回はガッツリと前後非対称に。
前回動画で、機体のローリング、特に下降時にブルブルと意図しない振動が発生していたのがちょっとみっともない感じでした。
機体を押し上げてる時は当然カムに大きな荷重がかかりますが、回転して頂点までいったところで一気にその荷重が解放されるため、その瞬間にガクつくのが1点、そして今度はカムに沿ってずるっと滑り落ちる形で動作が急加速してしまうためにブレるのがもう1点。
それを軽減するため、カムの頂点から下降側にかけては膨らみを強めてやりました。
併せて、カムが支えるパーツ、ローリングシューとでも呼びましょうかね。シューの断面における頂点位置と形状も削って調整しています。

このシューはそもそも、本体支持アームがくるくる回転しないようにするストッパーとして追加したもので、それをカムでぐいぐいやればローリングさせられるじゃん!ということで役割が変わった経緯があります。
より強固にブレを止めるべく、最初の画像のとおり後ろ側にも板を伸ばしてフレームの内側にキッチリ前後とも噛み合うように変更。これでだいぶローリング時の振動は減りました。
また、カムの上昇側は膨らみ始める位置をずらして、動き出しを遅らせているのも上の画像でお分かりかと思います。その理由がこちら。

前回動画からの切り出しですが、よく見ると後ろに引いた足を上げる際、一瞬足の裏全体が持ち上がってから踵が上がり爪先がまた地面につく、という変な動きをしていました。
踵が上がり始める時、機構の特性として軌跡としてはまずほぼ真上方向に上がってから前方へ移動していきますが、同時に本体も上昇し始めることになります。
その際、爪先だけは地面に付いたままになって欲しいところですが、以前も書いた通り歩幅を最大限にとってしまっているため、ほぼ限界まで関節が伸びてつっぱった状態で本体と踵が同時に上昇することで爪先が下がらず浮いてしまっている…ような気がする。
ということで、まず踵をしっかり浮かせてから本体が上昇するよう、ローリングの動き出しを遅らせたワケです。

左足に関しては解決です。
が、なんでか右足はまだ突っかかる感じがあるんですよねぇ…。
と思って見てたら、駆動軸が通ってる踵のスリットがちょっと左にズレてる?
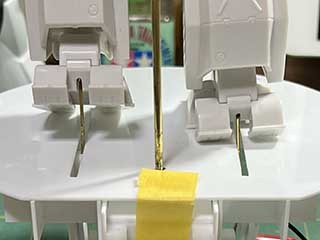
妙に爪先が内股ぽくなってしまう原因もこの辺か。
などなどやってますが、地平面の微妙な角度のズレで足の動きがかなり変わるのも確認。
ステージ部は裏に桁を組んでガッチリさせてはいますが、最終的な高さの微調整ができるように実はまだちゃんと固定できてないんですよね。
本体を形にしたところで台座側で辻褄を合わせようと思ってましたが、そうもいかないようで。
台座周りもさらに進めていく必要がありそうです。
取り出したるは、ガムテープの芯。
これを加工して、台座部の外装兼ステージ保持構造とします。

そのままでは紙なので毛羽立ちやヨレが生じるため、エッジに瞬着を浸み込ませつつ、全体にごってりとサフを吹いて、硬度を増してやりました。
ベースのプラ板を円形にしたのは、実はこうなる想定だったというわけです。

スポっとね。
ギミックの微調整とか台座の造形とか、地味な工程はさっさと片付けて本体を仕上げたいところですが、追加ギミックをどうするかなぁ…。
ではまた次回。
ひとまず一連の動きが実現は出来たもののアレコレ要調整だった疑似歩行ギミックを改修していきます。
もろもろやった結果から。

まぁこの画像だけでは分かりませんわな。
まずは本体を上下ローリグさせるカムの形状変更から。
何度かRのキツさを変えたりしてみてましたが、今回はガッツリと前後非対称に。
前回動画で、機体のローリング、特に下降時にブルブルと意図しない振動が発生していたのがちょっとみっともない感じでした。
機体を押し上げてる時は当然カムに大きな荷重がかかりますが、回転して頂点までいったところで一気にその荷重が解放されるため、その瞬間にガクつくのが1点、そして今度はカムに沿ってずるっと滑り落ちる形で動作が急加速してしまうためにブレるのがもう1点。
それを軽減するため、カムの頂点から下降側にかけては膨らみを強めてやりました。
併せて、カムが支えるパーツ、ローリングシューとでも呼びましょうかね。シューの断面における頂点位置と形状も削って調整しています。

このシューはそもそも、本体支持アームがくるくる回転しないようにするストッパーとして追加したもので、それをカムでぐいぐいやればローリングさせられるじゃん!ということで役割が変わった経緯があります。
より強固にブレを止めるべく、最初の画像のとおり後ろ側にも板を伸ばしてフレームの内側にキッチリ前後とも噛み合うように変更。これでだいぶローリング時の振動は減りました。
また、カムの上昇側は膨らみ始める位置をずらして、動き出しを遅らせているのも上の画像でお分かりかと思います。その理由がこちら。

前回動画からの切り出しですが、よく見ると後ろに引いた足を上げる際、一瞬足の裏全体が持ち上がってから踵が上がり爪先がまた地面につく、という変な動きをしていました。
踵が上がり始める時、機構の特性として軌跡としてはまずほぼ真上方向に上がってから前方へ移動していきますが、同時に本体も上昇し始めることになります。
その際、爪先だけは地面に付いたままになって欲しいところですが、以前も書いた通り歩幅を最大限にとってしまっているため、ほぼ限界まで関節が伸びてつっぱった状態で本体と踵が同時に上昇することで爪先が下がらず浮いてしまっている…ような気がする。
ということで、まず踵をしっかり浮かせてから本体が上昇するよう、ローリングの動き出しを遅らせたワケです。

左足に関しては解決です。
が、なんでか右足はまだ突っかかる感じがあるんですよねぇ…。
と思って見てたら、駆動軸が通ってる踵のスリットがちょっと左にズレてる?
妙に爪先が内股ぽくなってしまう原因もこの辺か。
などなどやってますが、地平面の微妙な角度のズレで足の動きがかなり変わるのも確認。
ステージ部は裏に桁を組んでガッチリさせてはいますが、最終的な高さの微調整ができるように実はまだちゃんと固定できてないんですよね。
本体を形にしたところで台座側で辻褄を合わせようと思ってましたが、そうもいかないようで。
台座周りもさらに進めていく必要がありそうです。
取り出したるは、ガムテープの芯。
これを加工して、台座部の外装兼ステージ保持構造とします。

そのままでは紙なので毛羽立ちやヨレが生じるため、エッジに瞬着を浸み込ませつつ、全体にごってりとサフを吹いて、硬度を増してやりました。
ベースのプラ板を円形にしたのは、実はこうなる想定だったというわけです。

スポっとね。
ギミックの微調整とか台座の造形とか、地味な工程はさっさと片付けて本体を仕上げたいところですが、追加ギミックをどうするかなぁ…。
ではまた次回。




大分調整が煮詰まってきて歩行機構終盤な感じですね!
完成版が楽しみであります。
こちらもストーブ以外の「道」がやっとこさ再開進行中ですが
まあいつも通り煮詰まって頭カスカスです(笑)
by yan (2022-02-27 22:29)
>yanさま
へんなドツボにはまらないようにペースを維持していきたいところですが、はてさてでございます。
そしてついにヘッドモデル道も再始動!?
by nuke (2022-02-27 23:22)